Toujours dans la même rubrique, le Phantom 4 n'est pas COCAPROOF :TomSxm a écrit :Salut tout le monde ! Je viens vous annoncer une bien triste nouvelle, mon cx20 a essayez de nager tout seul mais malheureusement il ne s'en est pas sortidans la rubrique "tester pour vous " LE CX 20 N'EST PAS WATERPROOF" haha !
CX-20 Open-source
-
Chris42

- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
nikond3

- Quadricopter
- Messages : 299
- Enregistré le : ven. 27 nov. 2015 11:45
- Réputation : 0
- Localisation : 78550 Houdan
Re: CX-20 Open-source
C'est vraiment pas des gens comme nous ces ricains...ils sont vraiment azimuter...
Pove Ph4...avec un peu de whisky ça aurai protéger les composants..
Et les cx...vous pensez qu'ils tiendraient mieux.?
Pove Ph4...avec un peu de whisky ça aurai protéger les composants..
Et les cx...vous pensez qu'ils tiendraient mieux.?

La vitesse de la lumière est supérieure à celle du son. C'est pourquoi, bien des gens ont l'air brillants jusqu'à ce qu'ils ouvrent la
bouche
-Phantom 1 V1.1.1 / Feiyu mini 2D / Xiaomi yi / Full FPV
-Phantom 3 Standard
-Phantom 3 Advanced
-
valere

- Bicopter
- Messages : 14
- Enregistré le : sam. 28 mai 2016 20:55
- Réputation : 0
Re: CX-20 Open-source
OUI 10mn ce n'est pas normal, j'ai eu le même problème que je pense avoir résolu. Il me fallait aussi beaucoup de temps pour armer le drone voire pas du tout.David a écrit :Salut Ryydax,
10mn c'est pas normal.
Ce temps d'attente est plus ou moins long. Mais pas 10mn ! C'est même pas 1mn. Quelques dizaines de secondes max.
Pour le GPS cela peut être plus long (1 à 2 mn) pour quelle se fixe. Mauvaise liaison et/ou nouveau lieu d'envole.
C'est la RC qui met en route un système de sécurité pour l'armement. Donc une fois la mélodie du Quad' terminée. Il faut de suite Allumer le RC pour na pas par la suite se trouver face à cette sécurité.
Bouger le Multi après le branchement (mélodie) doit se faire le plus à plat possible. Si l'assiette du Quad à reçu une forte inclinaison, Armé ou Désarme et se met en sécurité la aussi.
En gros. Allumer le Multi, dés la fin de la mélodie, la RC . Attendre que le GPS passe au fixe. Armer et décoller.
Cela prend moins d'1mn si le GPS ne prend pas plus de temps pour ce fixer.
J'ai remarqué que mon compas n'était plus à l'horizontal dans son boitier , je l'ai donc remis à plat et je l'ai recollé, maintenant mon drone s' arme dans les temps.
Merci de me dire si d'autres on eu ce ce problème.
-
valere
- Bicopter
- Messages : 14
- Enregistré le : sam. 28 mai 2016 20:55
- Réputation : 0
Re: CX-20 Open-source
OUI 10mn ce n'est pas normal, j'ai eu le même problème que je pense avoir résolu. Il me fallait aussi beaucoup de temps pour armer le drone voire pas du tout.Ryyydax a écrit :Re-bonjour à tous
Parfois j'ai un problème avec mon cx-20, quand j'allume le drone, puis que j'allume la RC, il ne veut jamais s'armer (stick gauche en bas à droite), un coup je galère 10min, l'autre coup il s'allume tout de suite, j'ai fais le test avec 2 RC de cx-20, c'est la même chose... D'où le problème pourrait venir ? J'attend bien 10secondes après les "bips" avant d'allumer ma RC...
Merci
J'ai remarqué que mon compas n'était plus à l'horizontal dans son boitier , je l'ai donc remis à plat et je l'ai recollé, maintenant mon drone s' arme dans les temps.
Merci de me dire si d'autres on eu ce ce problème. [yahoo.gif]
-
valere
- Bicopter
- Messages : 14
- Enregistré le : sam. 28 mai 2016 20:55
- Réputation : 0
Re: CX-20 Open-source
OUI 10mn ce n'est pas normal, j'ai eu le même problème que je pense avoir résolu. Il me fallait aussi beaucoup de temps pour armer le drone voire pas du tout.Tonyco30 a écrit :Ryyydax a écrit :Re-bonjour à tous
Parfois j'ai un problème avec mon cx-20, quand j'allume le drone, puis que j'allume la RC, il ne veut jamais s'armer (stick gauche en bas à droite), un coup je galère 10min, l'autre coup il s'allume tout de suite, j'ai fais le test avec 2 RC de cx-20, c'est la même chose... D'où le problème pourrait venir ? J'attend bien 10secondes après les "bips" avant d'allumer ma RC...
Merci
Il ne faudrait pas que tu ai un problème de communication entre le multi et ta RC
Dans le passé, mon bout d'antenne s'était coupé et bien entendu, plus moyen d'armer le CX-20 et encore moins de le faire voler
J'ai remarqué que mon compas n'était plus à l'horizontal dans son boitier , je l'ai donc remis à plat et je l'ai recollé, maintenant mon drone s' arme dans les temps.
Merci de me dire si d'autres on eu ce ce problème.
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Hello,
Quelqu'un saurait comment fonctionnent les connexions de l'ESC n°3 du CX20 / Nova ?

1 - Masse 12 V
2 - ?
3 - Alim 12 V
4 - Commande -
5 - Commande +
6 - Commande Signal
7 - ?
Le 2 : autour de 3 volts mesurés, je suppose qu'il s'agit de l'alim des LEDs ?
Le 7 : il est soudé avec le 6 et n'existe pas pour les 3 autres ESC, je ne vois pas à quoi ça peut servir ?
Quelqu'un saurait comment fonctionnent les connexions de l'ESC n°3 du CX20 / Nova ?
1 - Masse 12 V
2 - ?
3 - Alim 12 V
4 - Commande -
5 - Commande +
6 - Commande Signal
7 - ?
Le 2 : autour de 3 volts mesurés, je suppose qu'il s'agit de l'alim des LEDs ?
Le 7 : il est soudé avec le 6 et n'existe pas pour les 3 autres ESC, je ne vois pas à quoi ça peut servir ?
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
logow

- Quadricopter
- Messages : 261
- Enregistré le : dim. 24 mai 2015 22:25
- Réputation : 2
- Localisation : ALSACE
- Genre :
- Contact :
Re: CX-20 Open-source
le 2 est bien l'alim led ou ca masse (petit doute)
le 7 est une liaison ppm pour la gestion des led / batterie
le 7 est une liaison ppm pour la gestion des led / batterie
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Merci Logow !
J'ai eu aussi une réponse de Mr.Jagger de RCGroups :
1/. Ground [ Masse]
2/. LED control [ LED de contrôle]
3/. Power ( up to 4S allegedly ) [ Puissance (jusqu'à 4S prétendument)]
4/. Ground from FC [ Masse du contrôleur de vol]
5/. Nothing - usually the BEC output from the ESC but this ESC doesn't have a BEC. [ Rien - habituellement la sortie BEC du ESC mais cet ESC n'a pas de BEC.] Normally cut somewhere along it's length from the factory. [ Normalement coupé quelque part le long de sa longueur à partir de l'usine.]
6/. Signal from FC [ Signal du contrôleur de vol]
7/. Goes to a tab marked PPM on some power boards. [ Va à un onglet marqué PPM sur certaines cartes d'alimentation.] Something to do with the low voltage alarm LED behaviour. [ Quelque chose à voir avec l'alarme de basse tension comportement LED.] You can run without it. [ Vous pouvez marcher sans elle.]
Donc en cas de transposition sur une frame il faut garder, à minima et sans la fonctionnalité des LEDs des ESC :
1 - Masse
3 - Power
4 - Masse FC
6 - Signal FC
(... et éventuellement le 5 pour éviter de démonter le câble triple)
J'ai juste ?
Et si on veut retrouver la fonctionnalité des LEDs des ESC ?
J'ai eu aussi une réponse de Mr.Jagger de RCGroups :
1/. Ground [ Masse]
2/. LED control [ LED de contrôle]
3/. Power ( up to 4S allegedly ) [ Puissance (jusqu'à 4S prétendument)]
4/. Ground from FC [ Masse du contrôleur de vol]
5/. Nothing - usually the BEC output from the ESC but this ESC doesn't have a BEC. [ Rien - habituellement la sortie BEC du ESC mais cet ESC n'a pas de BEC.] Normally cut somewhere along it's length from the factory. [ Normalement coupé quelque part le long de sa longueur à partir de l'usine.]
6/. Signal from FC [ Signal du contrôleur de vol]
7/. Goes to a tab marked PPM on some power boards. [ Va à un onglet marqué PPM sur certaines cartes d'alimentation.] Something to do with the low voltage alarm LED behaviour. [ Quelque chose à voir avec l'alarme de basse tension comportement LED.] You can run without it. [ Vous pouvez marcher sans elle.]
Donc en cas de transposition sur une frame il faut garder, à minima et sans la fonctionnalité des LEDs des ESC :
1 - Masse
3 - Power
4 - Masse FC
6 - Signal FC
(... et éventuellement le 5 pour éviter de démonter le câble triple)
J'ai juste ?
Et si on veut retrouver la fonctionnalité des LEDs des ESC ?
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
Tonyco30
- Octocopter
- Messages : 776
- Enregistré le : mer. 25 nov. 2015 18:47
- Réputation : 0
- Localisation : 30000
Re: CX-20 Open-source
Oui, le branchement des led/esc sur le cx-20 ou nova est vraiment particulier et propriétaire ![:]](./images/smilies/8.gif "Dan.San") ....
....
-
JeeAiif

- Octocopter
- Messages : 581
- Enregistré le : lun. 28 déc. 2015 16:25
- Réputation : 0
- Localisation : lyon
Re: CX-20 Open-source
Pour ceux qui ne connaitraient pas encore ce site:
https://www.exmaps.com/uavs" onclick="window.open(this.href);return false;
Je trouve que c'est pas mal pour archiver et/ou partager ces vols,contrôler ces logs,etc....
Ensuite je n'arrivais pas a armer les moteurs via Tower, en fait pour pouvoir le faire il faut être en FW v3.2.1 sinon kenini.
https://www.exmaps.com/uavs" onclick="window.open(this.href);return false;
Je trouve que c'est pas mal pour archiver et/ou partager ces vols,contrôler ces logs,etc....
Ensuite je n'arrivais pas a armer les moteurs via Tower, en fait pour pouvoir le faire il faut être en FW v3.2.1 sinon kenini.
-
logow
- Quadricopter
- Messages : 261
- Enregistré le : dim. 24 mai 2015 22:25
- Réputation : 2
- Localisation : ALSACE
- Genre :
- Contact :
Re: CX-20 Open-source
pour les intéresser, j'ai fais une petit vidéo sur le branchement d'une quanum i8 sur l'apm cx 20 et sa configuration!
beaucoup de défaut langage (comme PWM (puslsion avec modulation et non power modulation))
mea-culpa pour les erreurs, comme je le dit: d'un nul pour les nuls!!
@+
beaucoup de défaut langage (comme PWM (puslsion avec modulation et non power modulation))
mea-culpa pour les erreurs, comme je le dit: d'un nul pour les nuls!!
@+
-
JeeAiif
- Octocopter
- Messages : 581
- Enregistré le : lun. 28 déc. 2015 16:25
- Réputation : 0
- Localisation : lyon
Re: CX-20 Open-source
Merci "le nul" ,ca servira certainement un jour ou l'autre a l'un d'entre nous. 
Et niveau qualité,la i8 c'est la même chose que celle du cx-20 ?
Et niveau qualité,la i8 c'est la même chose que celle du cx-20 ?
-
sct-seb

- Quadricopter
- Messages : 265
- Enregistré le : jeu. 17 juil. 2014 18:46
- Réputation : 0
Re: CX-20 Open-source
Je sais que ce n'est pas l'endroit pour demander ça, mais je pense toucher plus de monde ici.
Suite à un crash test à l'insu de mon plein grès. Je suis à la recherche, pour un cx-20 bien sûr, d'un moteur ccw et de la "diode" rouge sans le cache.
A votre bon cœur, m'sieur dame.
Suite à un crash test à l'insu de mon plein grès. Je suis à la recherche, pour un cx-20 bien sûr, d'un moteur ccw et de la "diode" rouge sans le cache.
A votre bon cœur, m'sieur dame.
L'urgent est fait, l'impossible reste à faire... Pour les miracles, prévoir un délai.
-
Tonyco30
- Octocopter
- Messages : 776
- Enregistré le : mer. 25 nov. 2015 18:47
- Réputation : 0
- Localisation : 30000
Re: CX-20 Open-source
Je n'ai pas de moteur, mais j'ai une board complète, sans APM, de CX-20.
Je retrouve tout ça et je t'envoie des photos.
La suite par MP.

Je retrouve tout ça et je t'envoie des photos.
La suite par MP.
-
JeeAiif
- Octocopter
- Messages : 581
- Enregistré le : lun. 28 déc. 2015 16:25
- Réputation : 0
- Localisation : lyon
Re: CX-20 Open-source
J'ai remplacé mon Rx car les fils des antennes étaient pincés,j'en ai profité pour faire en partie la modif décrite par Chris42 ici:
https://www.multi-rotor-fans-club.com/v ... 89#p203489" onclick="window.open(this.href);return false;
Voila ce que cela donne:
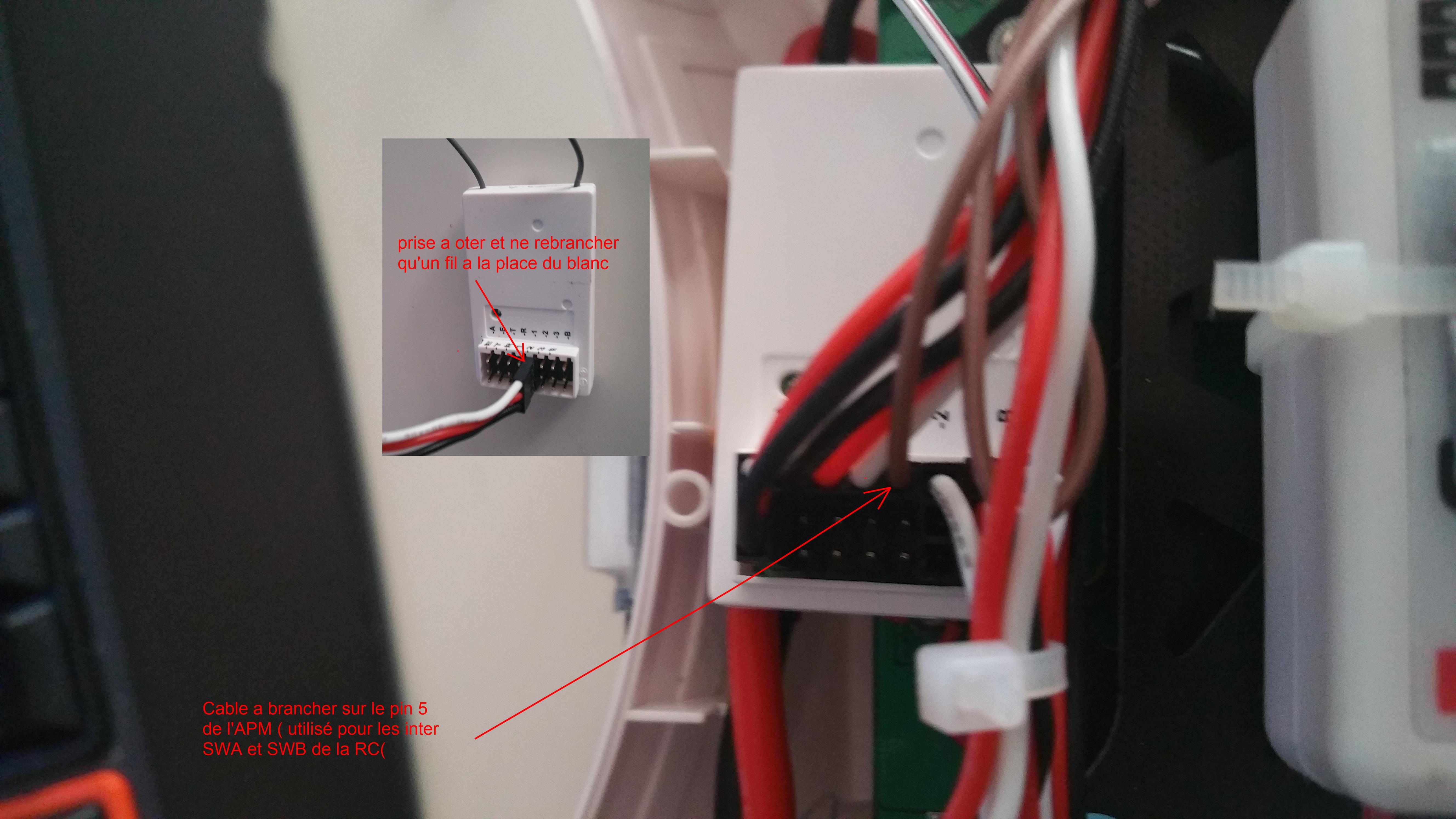
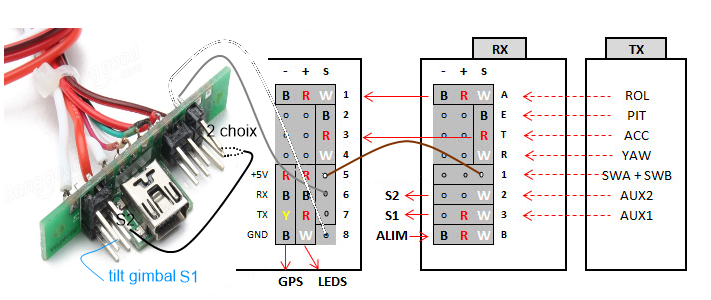
-On commence par virer la nappe (fil blanc,rouge et noir) qui va de l'emplacement n°1 sur le Rx a l'emplacement n° 5/6/7 de l'APM.
On ne remets qu'un câble en lieu et place du blanc (Signal) sur le Rx.

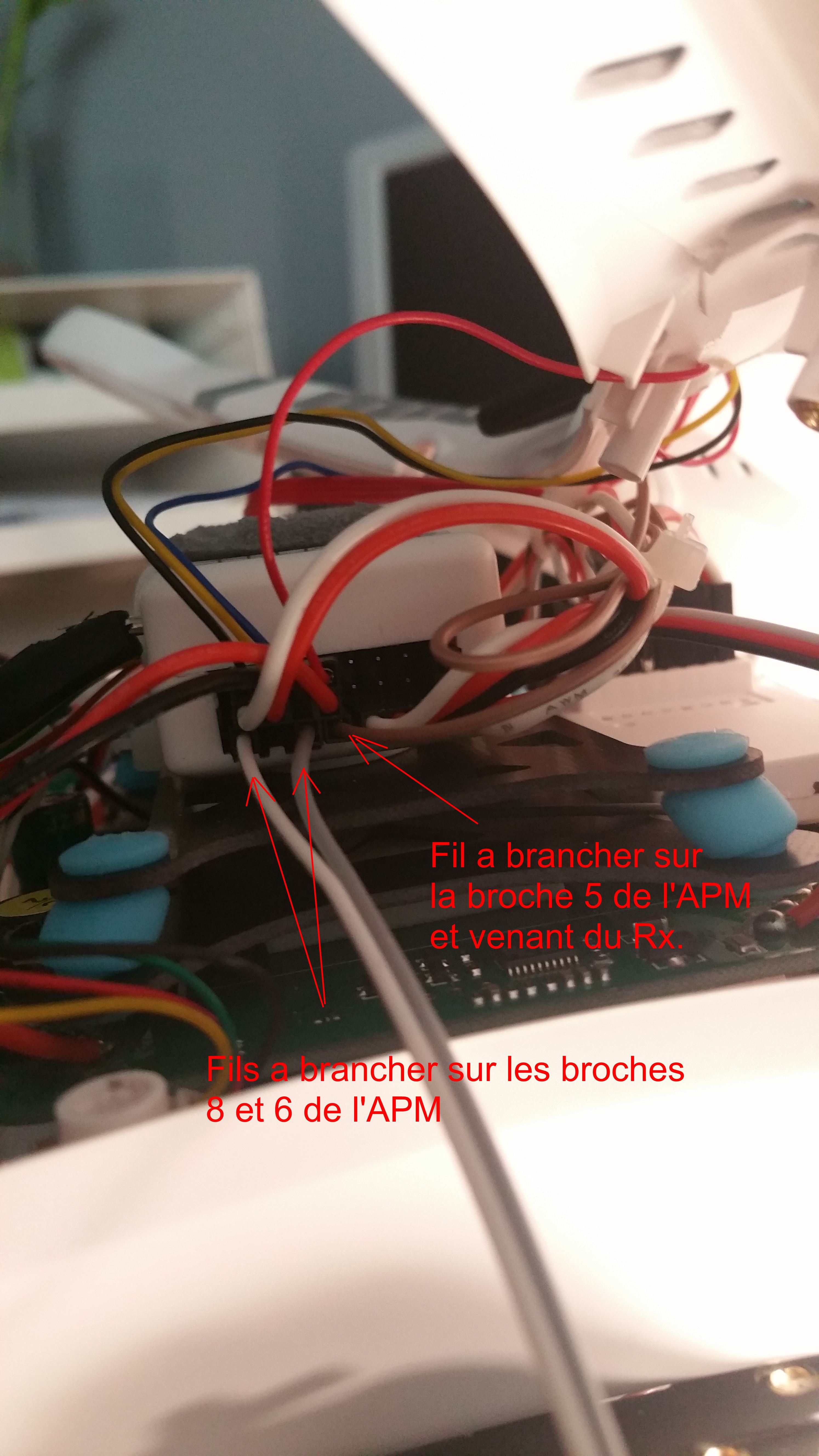
-Ce câble ce branche de l'autre coté a L'APM a l'emplacement n°5 (il sert pour SWA et SWB).
On rajoute alors deux fils au broches 6 et 8 de notre APM (ici couleur gris et blanc) qui seront paramétrables sous MP en CH6 et CH7.

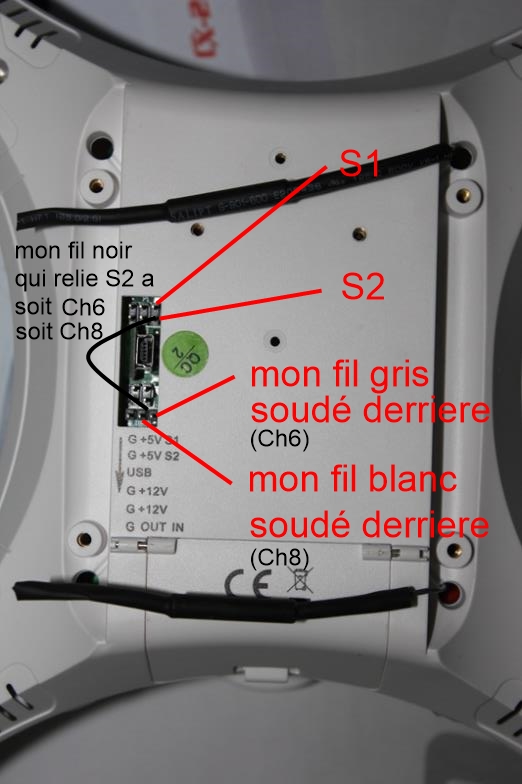
-Ces deux câbles seront soudés au dos de la petite plaque du dessous du CX (il existe plusieurs modèles différents de cette plaque)
http://img.banggood.com/thumb/water/upl ... 696-11.jpg" onclick="window.open(this.href);return false;

-Ensuite deux choix s'offrent a nous.Soit on cable S2 a la broche ou est soudé notre cable Gris (Ch6) soit S2 a la broche ou est soudé notre cable blanc (Ch8)


Ceci permet au fois fini de pouvoir actionner ,avec notre potentiomètre/inter Aux2 de la RC , soit une des fonctions Ch6 ou Ch8 de Mission planner en jouant simplement sur le branchement de notre fil noir sous le quad avant un vol.
Les fonctions Ch6 sont Min/Max (potentiomètre) alors que celles du Ch8 sont On/OFF (inter). Voir le post de Chris42:
https://www.multi-rotor-fans-club.com/v ... 00#p192900" onclick="window.open(this.href);return false;
Pour finir personnellement j'ai préférer garder S1 uniquement pour le tilt de la camera donc pas de modif la dessus.

Dites moi si c'est compréhensible ou non,si il y a des erreurs?

https://www.multi-rotor-fans-club.com/v ... 89#p203489" onclick="window.open(this.href);return false;
Voila ce que cela donne:
-On commence par virer la nappe (fil blanc,rouge et noir) qui va de l'emplacement n°1 sur le Rx a l'emplacement n° 5/6/7 de l'APM.
On ne remets qu'un câble en lieu et place du blanc (Signal) sur le Rx.
-Ce câble ce branche de l'autre coté a L'APM a l'emplacement n°5 (il sert pour SWA et SWB).
On rajoute alors deux fils au broches 6 et 8 de notre APM (ici couleur gris et blanc) qui seront paramétrables sous MP en CH6 et CH7.
-Ces deux câbles seront soudés au dos de la petite plaque du dessous du CX (il existe plusieurs modèles différents de cette plaque)
http://img.banggood.com/thumb/water/upl ... 696-11.jpg" onclick="window.open(this.href);return false;
{kind=link}

-Ensuite deux choix s'offrent a nous.Soit on cable S2 a la broche ou est soudé notre cable Gris (Ch6) soit S2 a la broche ou est soudé notre cable blanc (Ch8)

Ceci permet au fois fini de pouvoir actionner ,avec notre potentiomètre/inter Aux2 de la RC , soit une des fonctions Ch6 ou Ch8 de Mission planner en jouant simplement sur le branchement de notre fil noir sous le quad avant un vol.
Les fonctions Ch6 sont Min/Max (potentiomètre) alors que celles du Ch8 sont On/OFF (inter). Voir le post de Chris42:
https://www.multi-rotor-fans-club.com/v ... 00#p192900" onclick="window.open(this.href);return false;
Pour finir personnellement j'ai préférer garder S1 uniquement pour le tilt de la camera donc pas de modif la dessus.
Dites moi si c'est compréhensible ou non,si il y a des erreurs?
Modifié en dernier par JeeAiif le jeu. 7 juil. 2016 12:00, modifié 1 fois.
-
thibbea

- Octocopter
- Messages : 635
- Enregistré le : lun. 30 nov. 2015 17:10
- Réputation : 1
- Localisation : Nantes
Re: CX-20 Open-source
Top tout ces tutos
Merci
Merci
Youtube
- Mavic Pro
- Radiolink AT9, Xiaomi Yi
- DJI F550, Pixhawk, DJI E300, HAKRC Storm32 3D, FPV
- Cheerson CX-20 Open-source, nacelle Feiyu Mini 2D, Télémétrie (+powermodule), FPV
- Eachine Falcon 250 RTF
- Eachine QX90
- Mavic Pro
- Radiolink AT9, Xiaomi Yi
- DJI F550, Pixhawk, DJI E300, HAKRC Storm32 3D, FPV
- Cheerson CX-20 Open-source, nacelle Feiyu Mini 2D, Télémétrie (+powermodule), FPV
- Eachine Falcon 250 RTF
- Eachine QX90
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Pratique à l'utilisation, isn't it ?JeeAiif a écrit :J'ai remplacé mon Rx car les fils des antennes étaient pincés,j'en ai profité pour faire en partie la modif décrite par Chris42 ...
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
JeeAiif
- Octocopter
- Messages : 581
- Enregistré le : lun. 28 déc. 2015 16:25
- Réputation : 0
- Localisation : lyon
Re: CX-20 Open-source
Pas encore testé sur le terrain cette modif.
J'ai mis le FW v3.2.1 du coup aussi semaine derniere et juste fait un petit vol pour voir la réaction du quad.Avec le paramètre INS_MPU6K_FILTER à 20 tout c'est enfin bien passé avec ce FW.C’était la 3eme fois que je l'essayais et les 1eres fois le quad avait des actions vraiment zarbi.
Je passe donc enfin au mode de vol PosHold mais du coup pour l'autotune comment je fais? le mode Althold fonctionne encore?
J'ai mis le FW v3.2.1 du coup aussi semaine derniere et juste fait un petit vol pour voir la réaction du quad.Avec le paramètre INS_MPU6K_FILTER à 20 tout c'est enfin bien passé avec ce FW.C’était la 3eme fois que je l'essayais et les 1eres fois le quad avait des actions vraiment zarbi.
Je passe donc enfin au mode de vol PosHold mais du coup pour l'autotune comment je fais? le mode Althold fonctionne encore?
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Je crois que ça fonctionne aussi en PosHold (je ne fais quasiment jamais d'auto-tune)
Sinon tu peux toujours le remplacer provisoirement par le AltHold, le temps de la manip.
Tu as essayé les décollages et atterrissages en PosHold ?
L'étiquette qui va bien (prendre celle du bas pour ta nouvelle config) :

Sinon tu peux toujours le remplacer provisoirement par le AltHold, le temps de la manip.
Tu as essayé les décollages et atterrissages en PosHold ?
L'étiquette qui va bien (prendre celle du bas pour ta nouvelle config) :
Modifié en dernier par Chris42 le jeu. 7 juil. 2016 12:53, modifié 1 fois.
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
JeeAiif
- Octocopter
- Messages : 581
- Enregistré le : lun. 28 déc. 2015 16:25
- Réputation : 0
- Localisation : lyon
Re: CX-20 Open-source
Je teste tout ca vendredi
edit:
J'avais fait comme cela pour l’étiquette:

-ce matin comme prévu ,3 vols pour:
-autotune
-teste mode "Follow me" et "Guided"
-teste de la dernier modification pour les modes de vols sur le Ch6 et Ch8.
Pour l'autotune tout c'est bien déroulé et assez rapidement en plus.
Ensuite pour le follow me et le guided idem ,impeccable.
Pour le Follow Me ,on décolle ,on passe en poshold (si on a décollé en manuel) et on enclenche ce mode via l'interface Tower sur le téléphone/tablette.Le quad se tourne alors vers vous , prêt a vous suivre.On peut modifier la distance et la hauteur via Tower. J'ai trouvé ce mode vraiment sympa.
J'ai voulu pour finir tester le "Circle rate" via le potentiomètre AUX2 .J'ai donc enclenché un mode "circle" mais l'action sur le potar ne changeait rien.
Pourtant j'arrive bien a lancer l'autotune avec ce même potar (en switchant entre le Ch6 et Ch8) donc je pige pas trop.il faut que je revois ca.
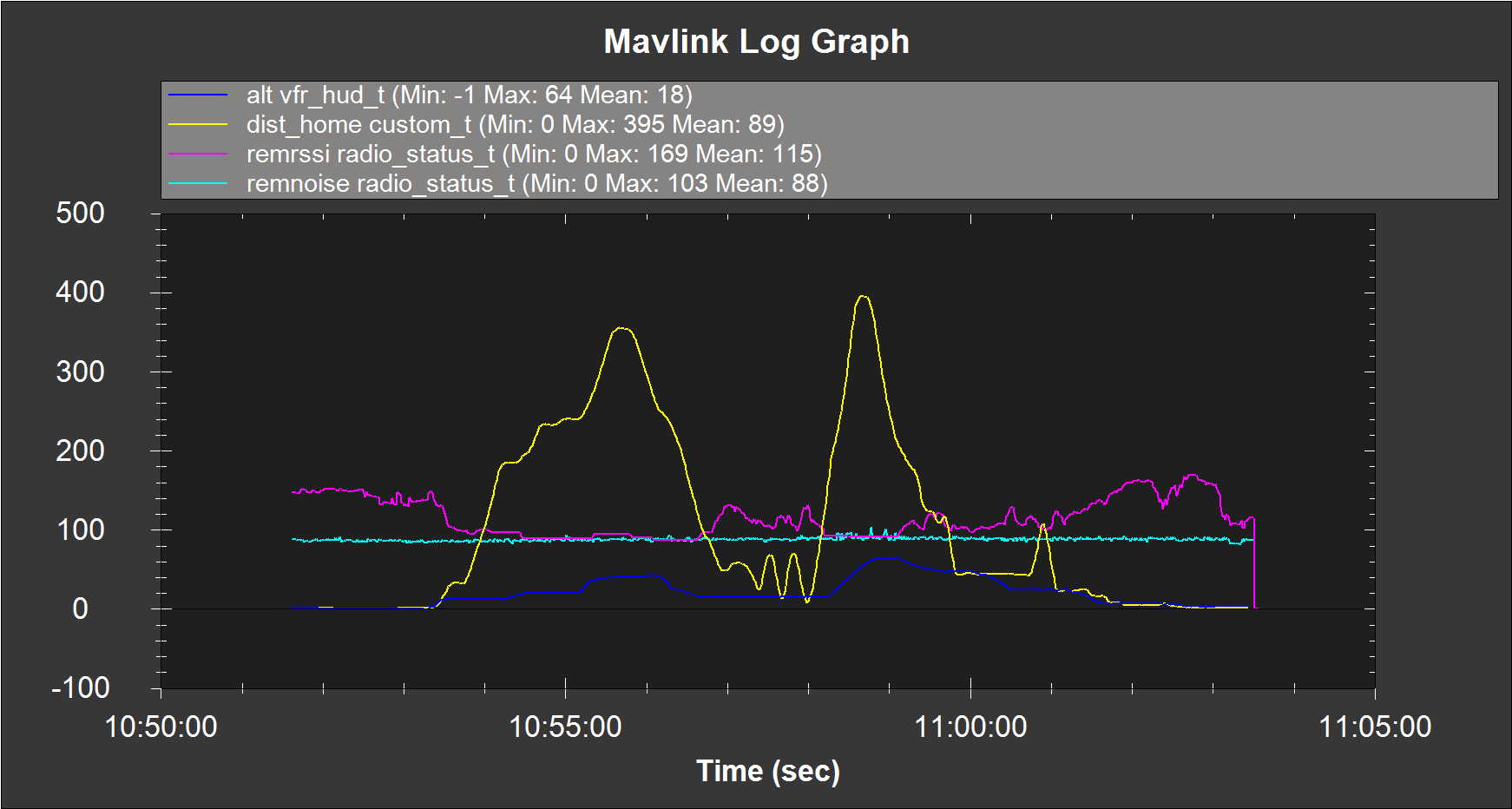
-Les Logs de la telemetrie:
On voit que le signal reste bon ,au moins jusqu’à 400m. (il faudra que je teste le max)

-Visu de l'autotune (on voit bien les mouvements cotés et avant/arriérè):
https://www.sendspace.com/file/6fhsrx" onclick="window.open(this.href);return false;
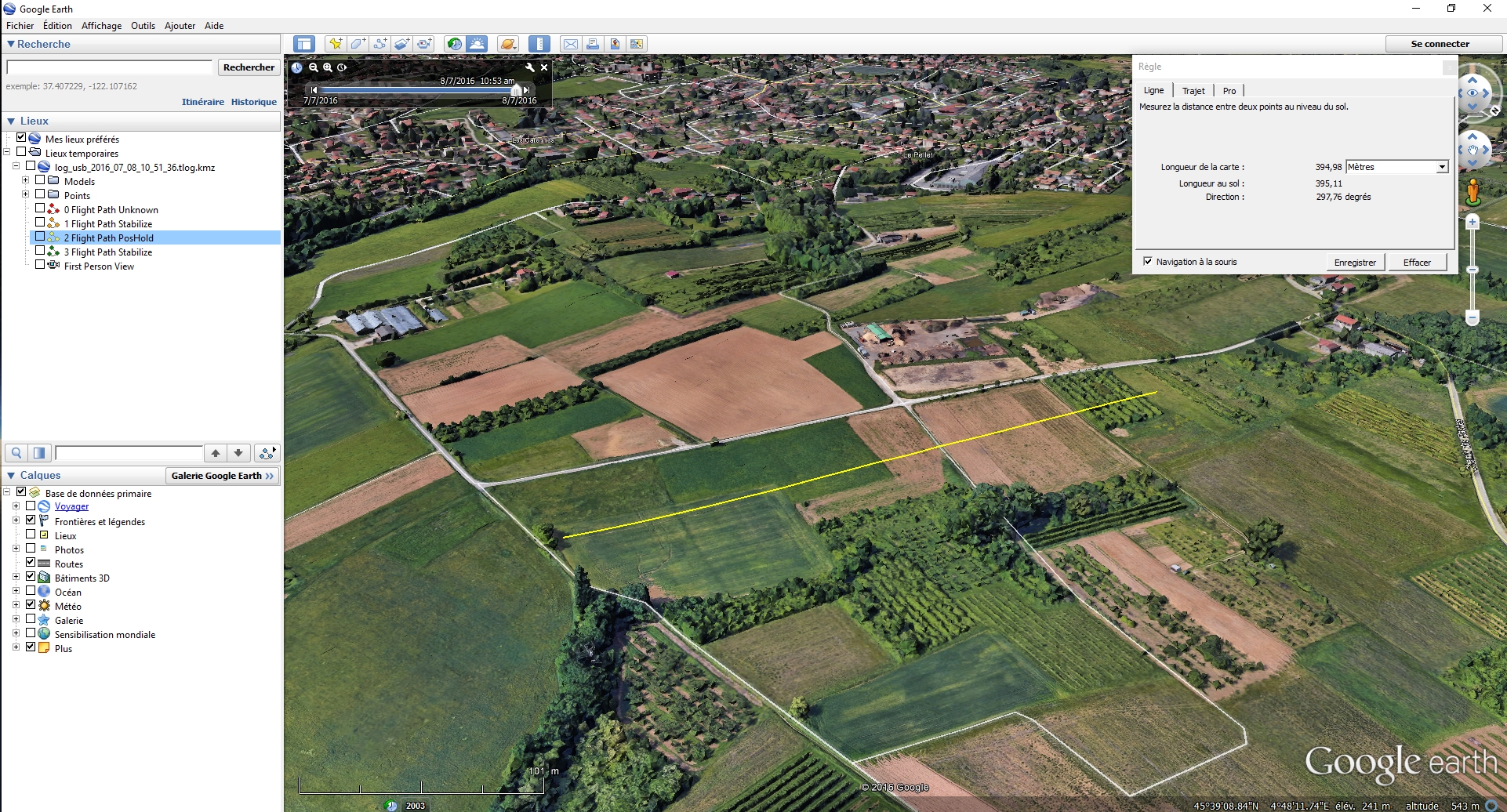
-Max Distance de la session:


edit:
J'avais fait comme cela pour l’étiquette:

-ce matin comme prévu ,3 vols pour:
-autotune
-teste mode "Follow me" et "Guided"
-teste de la dernier modification pour les modes de vols sur le Ch6 et Ch8.
Pour l'autotune tout c'est bien déroulé et assez rapidement en plus.
Ensuite pour le follow me et le guided idem ,impeccable.
Pour le Follow Me ,on décolle ,on passe en poshold (si on a décollé en manuel) et on enclenche ce mode via l'interface Tower sur le téléphone/tablette.Le quad se tourne alors vers vous , prêt a vous suivre.On peut modifier la distance et la hauteur via Tower. J'ai trouvé ce mode vraiment sympa.
J'ai voulu pour finir tester le "Circle rate" via le potentiomètre AUX2 .J'ai donc enclenché un mode "circle" mais l'action sur le potar ne changeait rien.
Pourtant j'arrive bien a lancer l'autotune avec ce même potar (en switchant entre le Ch6 et Ch8) donc je pige pas trop.il faut que je revois ca.
-Les Logs de la telemetrie:
On voit que le signal reste bon ,au moins jusqu’à 400m. (il faudra que je teste le max)
-Visu de l'autotune (on voit bien les mouvements cotés et avant/arriérè):
https://www.sendspace.com/file/6fhsrx" onclick="window.open(this.href);return false;
-Max Distance de la session:

-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
L'effet de la modification du paramètre Circle Rate n'est pas immédiat :JeeAiif a écrit : J'ai voulu pour finir tester le "Circle rate" via le potentiomètre AUX2 .J'ai donc enclenché un mode "circle" mais l'action sur le potar ne changeait rien.
Pourtant j'arrive bien a lancer l'autotune avec ce même potar (en switchant entre le Ch6 et Ch8) donc je pige pas trop.il faut que je revois ca.
Le firmware est conçu de telle manière que ce paramètre n'est lu que lorsque l'on enclenche le mode Circle.
Pour voir les effets des changements, il faut donc à chaque modification repasser en PosHold par exemple, puis revenir en Circle.
Les antennes Immersion (http://www.banggood.com/ImmersionRC-433 ... 58548.html" onclick="window.open(this.href);return false;) donnent de meilleurs résultats RSSI / NoiseJeeAiif a écrit :telemetrie : On voit que le signal reste bon ,au moins jusqu’à 400m
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
nikond3
- Quadricopter
- Messages : 299
- Enregistré le : ven. 27 nov. 2015 11:45
- Réputation : 0
- Localisation : 78550 Houdan
Re: CX-20 Open-source
Salut les voltigeurs,
Premier vol en 2.8 et super chute de 10m...
J'ai remarqué qu'il était pas stable, il montais et descendais tout seul en mode Loiter...et tout a coup, il est monté monté monté...et aucune possibilité de le reprendre en main...heureusement que la maison là stopper sinon il serait déjà en Normandie...mais j'ai rien compris.
Je pense que je viens de me faire mon premier Fly away...
Comment on fait pour voir ce qui c'est passé...?
Du coup, je vais le passer en F450 ou S500...si je peux tout garder du cx.
Premier vol en 2.8 et super chute de 10m...
J'ai remarqué qu'il était pas stable, il montais et descendais tout seul en mode Loiter...et tout a coup, il est monté monté monté...et aucune possibilité de le reprendre en main...heureusement que la maison là stopper sinon il serait déjà en Normandie...mais j'ai rien compris.
Je pense que je viens de me faire mon premier Fly away...
Comment on fait pour voir ce qui c'est passé...?
Du coup, je vais le passer en F450 ou S500...si je peux tout garder du cx.
La vitesse de la lumière est supérieure à celle du son. C'est pourquoi, bien des gens ont l'air brillants jusqu'à ce qu'ils ouvrent la
bouche
-Phantom 1 V1.1.1 / Feiyu mini 2D / Xiaomi yi / Full FPV
-Phantom 3 Standard
-Phantom 3 Advanced
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Vol en 2.8 ?????
Edit : ah oui ça y est j'ai percuté, APM 2.8
Pour voir ce qui s'est passé, regarder les logs.
Probablement tu avais laissé le filtre à 0 (changements d'altitude en Loiter) ou alors tu avais vraiment trop de vibrations.
Edit : ah oui ça y est j'ai percuté, APM 2.8
Pour voir ce qui s'est passé, regarder les logs.
Probablement tu avais laissé le filtre à 0 (changements d'altitude en Loiter) ou alors tu avais vraiment trop de vibrations.
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
Tonyco30
- Octocopter
- Messages : 776
- Enregistré le : mer. 25 nov. 2015 18:47
- Réputation : 0
- Localisation : 30000
Re: CX-20 Open-source
Ca c'est passé quand ? Regarde le champ magnétique : https://www.multi-rotor-fans-club.com/index.php" onclick="window.open(this.href);return false;, hier c'était rouge aussi.....
C'est peut être une coïncidence, mais tous les problèmes (crashs) que j'ai eu avec le CX ont eu lieu un jour ou le champs magnétique était en vrac
C'est peut être une coïncidence, mais tous les problèmes (crashs) que j'ai eu avec le CX ont eu lieu un jour ou le champs magnétique était en vrac
-
nikond3
- Quadricopter
- Messages : 299
- Enregistré le : ven. 27 nov. 2015 11:45
- Réputation : 0
- Localisation : 78550 Houdan
Re: CX-20 Open-source
C'était hier sur les coups de 18h00...
La vitesse de la lumière est supérieure à celle du son. C'est pourquoi, bien des gens ont l'air brillants jusqu'à ce qu'ils ouvrent la
bouche
-Phantom 1 V1.1.1 / Feiyu mini 2D / Xiaomi yi / Full FPV
-Phantom 3 Standard
-Phantom 3 Advanced