Quelques nouveaux essais aujourd'hui, pour retenter le Follow me et essayer le mode Drift.
Pour le Follow me, j'ai toujours de même message de l'appli Tower : "Unable to get accurate location. Please update your location settings !"
J'ai essayé tous le modes GPS de mon tel (celui que je préfère "GPS uniquement", et "Haute précision" qui utilise le GPS et le Wifi et le réseau mobile"), mais rien n'y fait. Pourtant mon tel reçoit très bien les signaux GPS, une bonne douzaine de satellites.
Pour le mode Drift, il faut beaucoup de place, surtout avec le vent d'aujourd'hui ... j'ai donc testé très rapidement et ça a l'air de bien fonctionner.
CX-20 Open-source
-
Chris42

- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Vous n’avez pas les permissions nécessaires pour voir les fichiers joints à ce message.
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
David

- Pilote toutes catégories
- Messages : 5563
- Enregistré le : ven. 31 juil. 2015 11:36
- Réputation : 5
- Localisation : Lyon
- Genre :
Re: CX-20 Open-source
Chris42 a écrit :Oooooouuups !!!!!! La manette était un peu basse, je me suis fait peur !
- Je reviens tout juste de mon entrainement de vol. Et la même erreur pour moi. Manette trop basse (40%) en changement de mode.
Oups ! comme tu dis.
- Je suis tout de même déçu de son comportement quand un léger vent se lève. Il faut avouer que la moindre brise l’emmène sans attendre.
Et pour ce qui est de naviguer contre ce vent, lui parait insoutenable. Il peine beaucoup. Ce qui rend le vol irrégulier, pas propre du tout. Et consomme pour pas grand chose. Arf ! maudit vent.
- J'ai pas arrêté d'analyser son angle par rapport à la commande reçu. C'est très faible. Très très faible sur le Pitch.
Le Tarantula qui est bien plus petit et surtout très léger (200g environ, poids total) évolue contre le même vent sans soucis .
La différence est fla-grande. L'angle d'attaque est bien plus prononcé pour le Tarantula. Ce poids plume combat aussi bien le climat que le Cheerson.
Y a un soucis !? Le CX-20 devrait naviguer avec plus "d'aisance" que le Tarantula. Ces deux oiseaux ne jouent dans la même court. Et pourtant...
- Les tests de Denis, sur l'angle d'attaque ou le Speed Loiter. Pourrait il quelque peut "remédier" ce problème ?
Le savoir est une Arme. Et je sort toujours armé.
DAVID
DAVID
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Oui, clairement.David a écrit :- Les tests de Denis, sur l'angle d'attaque ou le Speed Loiter. Pourrait il quelque peut "remédier" ce problème ?
Si tu mets un angle max à 35°, tu pourras remonter contre le vent d'aujourd'hui sans problème.
J'ai essayé, ça change totalement le comportement du quad, puis j'en suis revenu après avoir failli le perdre au cours d'un épisode que je préfère taire ici ...
Tiens ça me fait penser, j'ai presque fini mon 2ème tube de colle.
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
David
- Pilote toutes catégories
- Messages : 5563
- Enregistré le : ven. 31 juil. 2015 11:36
- Réputation : 5
- Localisation : Lyon
- Genre :
Re: CX-20 Open-source
- Merci Chris, pour cette info.
Je vais donc me procurer un câble et changer ça au plus vite.

- Prends garde avec la colle. Elle a un poids, et ne répare pas, mais reconsolide ton support (en théorie). Car en pratique c'est souvent pas la cas.
Dés que tu le peux. Changes donc de coque. Cela va te garantir un fuselage qui ne faussera pas l’évolution de ton CX-20. Et une garantie aussi pour la qualité de tes futur clichées aériens.
Parole de carrossier

Je vais donc me procurer un câble et changer ça au plus vite.
- Prends garde avec la colle. Elle a un poids, et ne répare pas, mais reconsolide ton support (en théorie). Car en pratique c'est souvent pas la cas.
Dés que tu le peux. Changes donc de coque. Cela va te garantir un fuselage qui ne faussera pas l’évolution de ton CX-20. Et une garantie aussi pour la qualité de tes futur clichées aériens.
Parole de carrossier
Le savoir est une Arme. Et je sort toujours armé.
DAVID
DAVID
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Nouveau test de Follow Me ce soir (je suis têtu) après désinstallation et réinstallation de Tower ... toujours le même message, en français cette fois :
J'ai essayé de faire la même chose avec ma vieille tablette Android (une Asus Transformer 1ère génération), et tout fonctionne correctement !
Malheureusement, cette tablette est trop grande pour emporter, avec son écran 11 pouces.
Mais je sais maintenant que c'est un problème entre mon Galaxy s5 et l'appli Tower, qui n'arrive pas à récupérer les data GPS du téléphone ...
J'ai essayé de faire la même chose avec ma vieille tablette Android (une Asus Transformer 1ère génération), et tout fonctionne correctement !
Malheureusement, cette tablette est trop grande pour emporter, avec son écran 11 pouces.
Mais je sais maintenant que c'est un problème entre mon Galaxy s5 et l'appli Tower, qui n'arrive pas à récupérer les data GPS du téléphone ...
Vous n’avez pas les permissions nécessaires pour voir les fichiers joints à ce message.
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
David
- Pilote toutes catégories
- Messages : 5563
- Enregistré le : ven. 31 juil. 2015 11:36
- Réputation : 5
- Localisation : Lyon
- Genre :
Re: CX-20 Open-source
- C'est peut être pas compatible tout simplement (?)
Dommage ! le Follow Me doit être sympa comme mode de vol.
Ou alors tu mets ta tablette sur un trépied (?)
Dommage ! le Follow Me doit être sympa comme mode de vol.
Ou alors tu mets ta tablette sur un trépied (?)
Le savoir est une Arme. Et je sort toujours armé.
DAVID
DAVID
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Je vais essayer de voir ça avec le support de l'appli Tower.
Ils ont testé avec le Galaxy s3 et s4, le s5 devrait fonctionner !
Ils ont testé avec le Galaxy s3 et s4, le s5 devrait fonctionner !
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Bon, j'ai enfin réussi à faire fonctionner le FollowMe avec Tower et mon Galaxy s5, j'avais seulement mal paramétré le GPS du s5.
Modifié en dernier par Chris42 le sam. 28 nov. 2015 06:10, modifié 1 fois.
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
David
- Pilote toutes catégories
- Messages : 5563
- Enregistré le : ven. 31 juil. 2015 11:36
- Réputation : 5
- Localisation : Lyon
- Genre :
Re: CX-20 Open-source
- Excellent Chris !
Tu vas nous faire une programmation du tonner.
C'est génial de le voir évoluer ainsi. Chouette travaille Chris.

Tu vas nous faire une programmation du tonner.
C'est génial de le voir évoluer ainsi. Chouette travaille Chris.
Le savoir est une Arme. Et je sort toujours armé.
DAVID
DAVID
-
Wovokaa

- Pilote toutes catégories
- Messages : 2692
- Enregistré le : ven. 6 mars 2015 01:16
- Réputation : 5
- Localisation : Pays-Basque
Re: CX-20 Open-source
Salut les gars 
Ben dis donc Chris, bientôt tu vas t'ennuyer ferme avec le CX-20 tu n'auras plus rien à découvrir...
tu n'auras plus rien à découvrir... 
Perso je préfère m'en tenir aux modes "classiques",

encore visibles ici,

il y a déjà bien assez de nœuds à se faire dans la tête durant un vol alors s'il faut réfléchir sur la position des inters, c'est un peu casse gueule...
alors s'il faut réfléchir sur la position des inters, c'est un peu casse gueule...
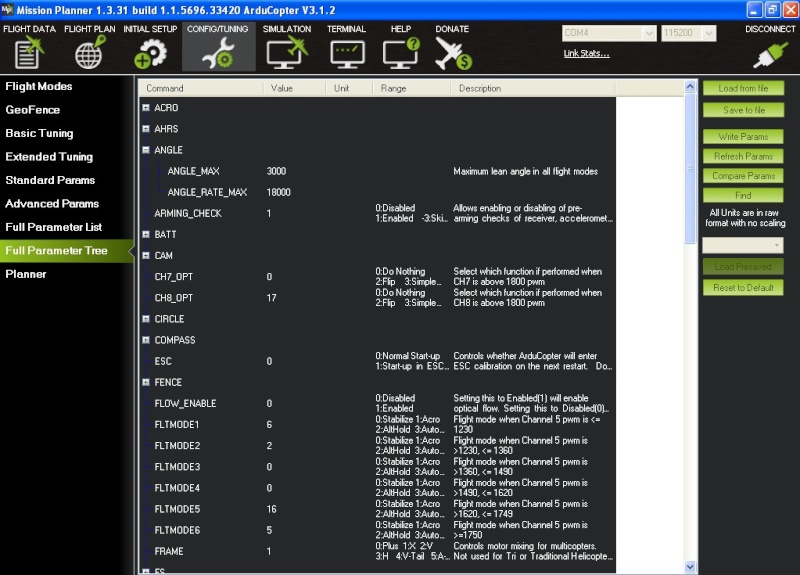
Dans l'idéal absolu, moi ce qui me plairait serait d'avoir le "RTL" sur un inter qui ne serve qu'à ce mode, et non pas avec une combinaison de deux inters, possible ? C'est pas du tout certain ça, les modes de vol se font sur la voie 5 de l'APM, ou alors peut-être en configurant l'inter n°7/8, à voir !

Pour simple rappel David,David a écrit : - J'ai pas arrêté d'analyser son angle par rapport à la commande reçu. C'est très faible. Très très faible sur le Pitch.
Ben dis donc Chris, bientôt tu vas t'ennuyer ferme avec le CX-20
Perso je préfère m'en tenir aux modes "classiques",
encore visibles ici,
il y a déjà bien assez de nœuds à se faire dans la tête durant un vol
Dans l'idéal absolu, moi ce qui me plairait serait d'avoir le "RTL" sur un inter qui ne serve qu'à ce mode, et non pas avec une combinaison de deux inters, possible ? C'est pas du tout certain ça, les modes de vol se font sur la voie 5 de l'APM, ou alors peut-être en configurant l'inter n°7/8, à voir !
*** André ***
"Je suis ce que je suis, grâce à ce que nous sommes tous"
Une autre passion, le Field Target,
http://www.afft.fr/forum/index.php?sid= ... 5789de1703
Ma chaîne YT,
https://www.youtube.com/user/wovoka64/videos
"Je suis ce que je suis, grâce à ce que nous sommes tous"
Une autre passion, le Field Target,
http://www.afft.fr/forum/index.php?sid= ... 5789de1703
Ma chaîne YT,
https://www.youtube.com/user/wovoka64/videos
-
David
- Pilote toutes catégories
- Messages : 5563
- Enregistré le : ven. 31 juil. 2015 11:36
- Réputation : 5
- Localisation : Lyon
- Genre :
Re: CX-20 Open-source
Coucou André,
- Super ! des photos de MP. Cela va grandement m'aider.
Je vois que tu as aussi changé le Loiter Speed à 1000. Je vais prendre ces paramètres là. Avec la photo ce sera facile.
Merki André. Là, je reprends le sourire.
- Super ! des photos de MP. Cela va grandement m'aider.
Je vois que tu as aussi changé le Loiter Speed à 1000. Je vais prendre ces paramètres là. Avec la photo ce sera facile.
Merki André. Là, je reprends le sourire.
Le savoir est une Arme. Et je sort toujours armé.
DAVID
DAVID
-
Dehas

- Administrateur du site
- Messages : 16172
- Enregistré le : ven. 3 juin 2011 12:50
- Réputation : 5
- Localisation : Saint Dié des Vosges
- Genre :
- Contact :
Re: CX-20 Open-source
Comme André, je suis passé en angle max 3000 et loiter speed a 1000, ça avance beaucoup mieux mais plus vif aux commandes aussi en stabilise.
Maintenant, je vous rapporte un soucis que j'ai, ma carte n'enregistre pas les logs depuis le début, j'ai recherché dans mission planner, et je me suis apperçus que LOG_BITMASK était a 0, je l'ai mis a 830 (voir param d'origine) je fais write param, c'est bon, je me déconnecte et me reconnecte et ...... retour a 0, j'ai essayé je ne sais plus combien de fois dans plusieurs onglets, même avec l'application sur le portable en bluetooth et ben il ne veut rien savoir, il suffit que je me déconnecte pour que le LOG_BITMASK revienne a 0 !!
Autre chose, l'autre semaine je parts voler, sur le terrain je prépare tout, séquence des leds, je mets les gaz et hop il me fait une drole de danse et sur le dos, je le remets sur ses pattes, je recommence, même danse et sur le dos avec 2 hélices cassées.
De retour a la maison je le passe sur Mp et là, tout est en vrac, les ACC ne sont pas calibrés et le nord est au nord/ouest !! il a fallu que je refasse toute les calibrations, elles avaient été toute effacé, sur le coup, je suis dubitatif, j’espère que la carte n'a pas un soucis.
Depuis je n'ai pas eu le temps de revoler, j'espere que ce n'est qu'un petit bug !!
Maintenant, je vous rapporte un soucis que j'ai, ma carte n'enregistre pas les logs depuis le début, j'ai recherché dans mission planner, et je me suis apperçus que LOG_BITMASK était a 0, je l'ai mis a 830 (voir param d'origine) je fais write param, c'est bon, je me déconnecte et me reconnecte et ...... retour a 0, j'ai essayé je ne sais plus combien de fois dans plusieurs onglets, même avec l'application sur le portable en bluetooth et ben il ne veut rien savoir, il suffit que je me déconnecte pour que le LOG_BITMASK revienne a 0 !!
Autre chose, l'autre semaine je parts voler, sur le terrain je prépare tout, séquence des leds, je mets les gaz et hop il me fait une drole de danse et sur le dos, je le remets sur ses pattes, je recommence, même danse et sur le dos avec 2 hélices cassées.
De retour a la maison je le passe sur Mp et là, tout est en vrac, les ACC ne sont pas calibrés et le nord est au nord/ouest !! il a fallu que je refasse toute les calibrations, elles avaient été toute effacé, sur le coup, je suis dubitatif, j’espère que la carte n'a pas un soucis.
Depuis je n'ai pas eu le temps de revoler, j'espere que ce n'est qu'un petit bug !!
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Disons que pour l'instant j'en suis à la séquence "apprentissage, réglages, tests en tous genres, et tubes de colle qui vont avec".Wovokaa a écrit :Ben dis donc Chris, bientôt tu vas t'ennuyer ferme avec le CX-20
Donc tant qu'à faire, autant essayer de dégrossir jusqu'au bout des possibilités de cet engin, voilà qui est fait !
Maintenant on va rentrer dans le détail :
J'attends ma livraison d'une caméra plus légère, d'une nacelle 2D, d'un module Power, de Gemfan neuves, et pendant cette (ou ces) semaines d'attente je vais pouvoir continuer à tenter mes expériences crashesques.
Quand j'aurai reçu tout ça, je pourrai monter ma coque toute neuve qui attend bien au chaud, et finir de l'installer dans la config que je considère comme complète.
En effet, je fais l'impasse sur le FPV pour cet appareil que je réserve pour la prise de vues, on verra plus tard sur un autre ... qui volera plus vite !
Cet après-midi avec le vent, je m'entraîne à faire des décollages / atterrissages pour qu'ils soient aussi beaux que les tiens.
Pour cela j'ai fait une petite adaptation à mon CX-20 :
Ce sont 4 petites boules en polystyrène, achetées dans une boutique de loisirs créatifs et collées au bout de tubes en carbone, restes d'un ancien cerf-volant.
Ça marche super bien ! J'ai vu qu'ils en avaient des bien plus grosses, ça donne des idées pour survoler les lacs ...
Sur la balance, j'en suis maintenant à 1188 grammes tout compris :
La batterie, ma vieille camera GoPro HD2 avec son back-pack wifi et sa coque étanche, la télémétrie, les "élargisseurs de voie", et son tube 1/2 de colle bi-composants étalée un peu partout ...
Question intéressante :Wovokaa a écrit :Dans l'idéal absolu, moi ce qui me plairait serait d'avoir le "RTL" sur un inter qui ne serve qu'à ce mode, et non pas avec une combinaison de deux inters, possible ? C'est pas du tout certain ça, les modes de vol se font sur la voie 5 de l'APM, ou alors peut-être en configurant l'inter n°7/8, à voir !
- La modif doit nécessiter de la soudure AMHA, et peut-être Dehas a la réponse avec ses recherches sur les inters de la radiocommande ?
Moi j'aurais une autre question un peu du même ordre :
- Peut-on programmer la position 1-0 à autre chose qu'un doublon du Stabilize de la position 0-0 ?
Vous n’avez pas les permissions nécessaires pour voir les fichiers joints à ce message.
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
David
- Pilote toutes catégories
- Messages : 5563
- Enregistré le : ven. 31 juil. 2015 11:36
- Réputation : 5
- Localisation : Lyon
- Genre :
Re: CX-20 Open-source
Salut Denis, 
- Bah mince alors ! C'est quoi ce Big-Mac ? J'en reviens pas !
Pourquoi ton AMP ne mémorise plus rien ? Ça se pourrait bien qu'il soit plus ou moins "HS".
As tu essayé de reset les paramètres via le p'tit fichier texte ? Dés fois que...
Je n'y crois pas trop. Mais sait on jamais ? Même si je pense que c'est un problème matériel que autres.
Si c'est le cas, faire fonctionner le SAV (?)
- Et merci pour la confirmation des paramètres. Je n'en doute plus désormais.
Elles seront implantées dans le Tuto, si cela reste inchangées.
- Bah mince alors ! C'est quoi ce Big-Mac ? J'en reviens pas !
Pourquoi ton AMP ne mémorise plus rien ? Ça se pourrait bien qu'il soit plus ou moins "HS".
As tu essayé de reset les paramètres via le p'tit fichier texte ? Dés fois que...
Je n'y crois pas trop. Mais sait on jamais ? Même si je pense que c'est un problème matériel que autres.
Si c'est le cas, faire fonctionner le SAV (?)
- Et merci pour la confirmation des paramètres. Je n'en doute plus désormais.
Elles seront implantées dans le Tuto, si cela reste inchangées.
Le savoir est une Arme. Et je sort toujours armé.
DAVID
DAVID
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
J'ai fait des recherches de ce côté-là aussi, lis ceci :Dehas a écrit :ma carte n'enregistre pas les logs depuis le début, j'ai recherché dans mission planner, et je me suis apperçus que LOG_BITMASK était a 0, je l'ai mis a 830 (voir param d'origine) je fais write param, c'est bon, je me déconnecte et me reconnecte et ...... retour a 0, j'ai essayé je ne sais plus combien de fois dans plusieurs onglets, même avec l'application sur le portable en bluetooth et ben il ne veut rien savoir, il suffit que je me déconnecte pour que le LOG_BITMASK revienne a 0 !!
http://copter.ardupilot.com/wiki/common ... sing-logs/" onclick="window.open(this.href);return false;
et
http://copter.ardupilot.com/wiki/common ... n-planner/" onclick="window.open(this.href);return false;
Si tu parles des logs Dataflash, alors c'est à partir de la v.3.2
Et donc si j'ai bien compris, pour avoir des logs en V.3.1.x il faut un kit télémétrie.
Modifié en dernier par Chris42 le mar. 20 oct. 2015 17:44, modifié 1 fois.
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
David
- Pilote toutes catégories
- Messages : 5563
- Enregistré le : ven. 31 juil. 2015 11:36
- Réputation : 5
- Localisation : Lyon
- Genre :
Re: CX-20 Open-source
- C'est doublon en Vol. Mais au sol c'est la mémorisation de la Calibration RC.Chris42 a écrit :- Peut-on programmer la position 1-0 à autre chose qu'un doublon du Stabilize de la position 0-0 ?
Mais perso je préfère rester tel quel (doublon). Car si tu désires reprendre l'oiseau en main vite fait bien fait.
Il n'y a qu'à basculer l'inter(A) sur 0. Peut importe le SWB. simple, rapide et efficace.
Sinon ça fait jouer de l'inter dans tout les sens. Ce qui peut amener à un crash.
Modifié en dernier par David le mar. 20 oct. 2015 18:20, modifié 2 fois.
Le savoir est une Arme. Et je sort toujours armé.
DAVID
DAVID
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Tu es vraiment sûr de ça ?
J'ai remarqué que quand on bascule de l'un à l'autre, dans Mission Planner rien ne bouge ...
J'ai remarqué que quand on bascule de l'un à l'autre, dans Mission Planner rien ne bouge ...
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
Dehas
- Administrateur du site
- Messages : 16172
- Enregistré le : ven. 3 juin 2011 12:50
- Réputation : 5
- Localisation : Saint Dié des Vosges
- Genre :
- Contact :
-
David
- Pilote toutes catégories
- Messages : 5563
- Enregistré le : ven. 31 juil. 2015 11:36
- Réputation : 5
- Localisation : Lyon
- Genre :
Re: CX-20 Open-source
- Si le CX-20 est coupé et que la RC est allumé, oui je confirme !
Pour le reste (en vol) non. Je ne peux confirmer. André ou Denis pourrait confirmer, ou pas.
- J'ai ré-édité le post au-dessus. J'y ai mis ce que pensais des inter(s) 1-0.
Pour le reste (en vol) non. Je ne peux confirmer. André ou Denis pourrait confirmer, ou pas.
- J'ai ré-édité le post au-dessus. J'y ai mis ce que pensais des inter(s) 1-0.
Le savoir est une Arme. Et je sort toujours armé.
DAVID
DAVID
-
Wovokaa
- Pilote toutes catégories
- Messages : 2692
- Enregistré le : ven. 6 mars 2015 01:16
- Réputation : 5
- Localisation : Pays-Basque
Re: CX-20 Open-source
Pinaise, vous postez vite
Alors pour Denis, sur mon CX-20 c'est comme ça,

et donc si le LOG_BITMASK est "Disabled" et bien tu connais la suite...
Pour ton souci d'APM en vrac, tu as peut-être fait un Reset quelque part.

J'ai trouvé, les inters 7 et 8 peuvent se configurer pour le RTL, il faut alors détourner AUX1 ou 2 comme on le fait pour l'AutoTune, le mieux est évidemment de le faire en interne.
Effectivement il y a un doublon en Stabilize, mais là ?!
Alors pour Denis, sur mon CX-20 c'est comme ça,
et donc si le LOG_BITMASK est "Disabled" et bien tu connais la suite...
Pour ton souci d'APM en vrac, tu as peut-être fait un Reset quelque part.
Et le mien tout compris, avec lipo, gimbal, Mobius, TX et cam FPV, c'est la clé du succès [yahoo.gif]Chris42 a écrit :Sur la balance, j'en suis maintenant à 1188 grammes tout compris :
---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Question intéressante :Wovokaa a écrit :Dans l'idéal absolu, moi ce qui me plairait serait d'avoir le "RTL" sur un inter qui ne serve qu'à ce mode, et non pas avec une combinaison de deux inters, possible ? C'est pas du tout certain ça, les modes de vol se font sur la voie 5 de l'APM, ou alors peut-être en configurant l'inter n°7/8, à voir !
- La modif doit nécessiter de la soudure AMHA, et peut-être Dehas a la réponse avec ses recherches sur les inters de la radiocommande ?
Moi j'aurais une autre question un peu du même ordre :
- Peut-on programmer la position 1-0 à autre chose qu'un doublon du Stabilize de la position 0-0 ?
J'ai trouvé, les inters 7 et 8 peuvent se configurer pour le RTL, il faut alors détourner AUX1 ou 2 comme on le fait pour l'AutoTune, le mieux est évidemment de le faire en interne.
Effectivement il y a un doublon en Stabilize, mais là ?!
*** André ***
"Je suis ce que je suis, grâce à ce que nous sommes tous"
Une autre passion, le Field Target,
http://www.afft.fr/forum/index.php?sid= ... 5789de1703
Ma chaîne YT,
https://www.youtube.com/user/wovoka64/videos
"Je suis ce que je suis, grâce à ce que nous sommes tous"
Une autre passion, le Field Target,
http://www.afft.fr/forum/index.php?sid= ... 5789de1703
Ma chaîne YT,
https://www.youtube.com/user/wovoka64/videos
-
Dehas
- Administrateur du site
- Messages : 16172
- Enregistré le : ven. 3 juin 2011 12:50
- Réputation : 5
- Localisation : Saint Dié des Vosges
- Genre :
- Contact :
Re: CX-20 Open-source
@Chris42: Tu confonds les logs et tlogs, les logs s'enregistre dans l'APM en mémoire flash et les tlogs par la télémétrie a l'armement des moteurs.
A partir de la version 3.2x, il n'y a plus de logs car plus assez de mémoire flash dans le 2560, avec notre version (3.1.2) cela est encore possible, voir sur RCGroup, dans le post sur le CX-20, il y en a qui publie leur logs.
Vivement que la télémétrie arrive !!
@Wovokaa: Sur les param d'origine le LOG_BITMASK est a 830 ce qui correspond bien a default, le mien reste sur disabled !!
Faut que je vous fasse un tuto pour mettre un inter a la place de AUX2, j'ai les photos, reste plus qu'a !!
A partir de la version 3.2x, il n'y a plus de logs car plus assez de mémoire flash dans le 2560, avec notre version (3.1.2) cela est encore possible, voir sur RCGroup, dans le post sur le CX-20, il y en a qui publie leur logs.
Vivement que la télémétrie arrive !!
@Wovokaa: Sur les param d'origine le LOG_BITMASK est a 830 ce qui correspond bien a default, le mien reste sur disabled !!
Faut que je vous fasse un tuto pour mettre un inter a la place de AUX2, j'ai les photos, reste plus qu'a !!
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
@dehas :
Bah non, je crois pas ...
- Pour les tlogs, on est d'accord, ça se fait par télémétrie et ça enregistre directement dans la "ground station"
- pour les logs dataflash, ça s'enregistre dans la mémoire de l'APM, ....
Jusque là on est d'accord, mais je lis ici :
http://copter.ardupilot.com/wiki/common ... n-planner/" onclick="window.open(this.href);return false;
Downloading logs via MAVLink :
This method is available in AC3.2 (or higher).
Moi avec ça je comprends que c'est possible à partir de la 3.2, et non le contraire ...
D'ailleurs tiens au fait, moi aussi tous mes fichiers param que j'ai enregistrés ont un LOG_BITMASK à 0 et non 830 (pour mémoire, je suis en 3.1.5)
Bah non, je crois pas ...
- Pour les tlogs, on est d'accord, ça se fait par télémétrie et ça enregistre directement dans la "ground station"
- pour les logs dataflash, ça s'enregistre dans la mémoire de l'APM, ....
Jusque là on est d'accord, mais je lis ici :
http://copter.ardupilot.com/wiki/common ... n-planner/" onclick="window.open(this.href);return false;
Downloading logs via MAVLink :
This method is available in AC3.2 (or higher).
Moi avec ça je comprends que c'est possible à partir de la 3.2, et non le contraire ...
D'ailleurs tiens au fait, moi aussi tous mes fichiers param que j'ai enregistrés ont un LOG_BITMASK à 0 et non 830 (pour mémoire, je suis en 3.1.5)
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
Wovokaa
- Pilote toutes catégories
- Messages : 2692
- Enregistré le : ven. 6 mars 2015 01:16
- Réputation : 5
- Localisation : Pays-Basque
Re: CX-20 Open-source
Les Logs sont bien accessibles sur le fw 3.1.2, chez moi ça fonctionne...par contre 0 ou 830, je ne sais pas où le chercher ?Chris42 a écrit : Moi avec ça je comprends que c'est possible à partir de la 3.2, et non le contraire ...
*** André ***
"Je suis ce que je suis, grâce à ce que nous sommes tous"
Une autre passion, le Field Target,
http://www.afft.fr/forum/index.php?sid= ... 5789de1703
Ma chaîne YT,
https://www.youtube.com/user/wovoka64/videos
"Je suis ce que je suis, grâce à ce que nous sommes tous"
Une autre passion, le Field Target,
http://www.afft.fr/forum/index.php?sid= ... 5789de1703
Ma chaîne YT,
https://www.youtube.com/user/wovoka64/videos
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Ce qui serait bien, c'est un inter en plus, et non à la place du AUX2.Dehas a écrit :Faut que je vous fasse un tuto pour mettre un inter a la place de AUX2, j'ai les photos, reste plus qu'a !!
Pour l'histoire des positions 0-0 et 1-0, je pense avoir pigé :
Le 1-0 sert effectivement à calibrer la RC, en allumant la radio avec l'inter basculé en 1, mais ce signal reste dans la radio, il n'est pas transmis au CX-20.
Dans la mesure où l'on peut faire une calibration avec MP, alors cette procédure peut être supprimée, et on peut alors récupérer la position pour autre chose, non ?
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Pourtant le wiki est assez clair ... et chez moi je ne peux pas récupérer les logs par cette méthode.Wovokaa a écrit :Les Logs sont bien accessibles sur le fw 3.1.2, chez moi ça fonctionne...par contre 0 ou 830, je ne sais pas où le chercher ?
Peut-être est-ce une des fonctionnalités que l'on perd avec la MAJ firmware, et que l'on récupère seulement à partir de la v.3.2 ?
Le LOG_BITMASK, tu le récupères dans une sauvegarde d'un de tes fichiers param (avec l'écran "Full parameter list" où tu peux aussi le voir directement)
Modifié en dernier par Chris42 le mar. 20 oct. 2015 19:20, modifié 2 fois.
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE