Balise DGAC mavlink légère et pas chère!
Posté : ven. 5 févr. 2021 12:38
Bonjour,
J'ai hésité avec la partie tutorial, si d'aventure j'avais eu tort Dehas sera me déporter au bon endroit, bref...
Comme vous le savez, ou devriez le savoir, nombre d’entre nous sont concernés par la nouvelle lois qui implique d’avoir une balise wifi qui émet (entre autres) la position du drone toutes les 3 secondes ou tout les 30m.
La fédé d’aéromodélisme avait promis 10€ 10g, des balise sont sorties à 150€, à 60€…etc.
Je vous propose 3€ 10g soit mieux que la fédé, si vous possédez déjà la connectique.
Mon travail est lui-même basé et largement inspiré sur une autre version de cette même balise qui comporte un gps BN220 et une carte D1 mini.
Page d’explication ici : tranquille-informatique.fr/balise-dgac-signalement-electronique-a-distance-drone-aeromodelisme.html
Pour les bidouilleurs le fil complet ici (je vous préviens c’est long): https://discuss.ardupilot.org/t/open-source-french-drone-identification/56904/
La différence avec mon système? Je vole en pixhawk et ce gps supplémentaire vient en redondance avec celui branché sur le pixhawk. J’ai donc entrepris de récupérer toutes les informations via Mavlink pour me passé de ce BN220 ce qui au passage économise 10€ et quelques grammes dont tous peuvent donc bénéficier.
Tout est là : https://github.com/BL08FR/balise_dgac_web_Mavlink
Préalable :
- Avoir en sa possession une carte type wifi D1 mini (3€ chez les tchang) et un jeu de câbles pour se branché sur un port TELEM du FC.
- Installer Arduino IDE (programme qui sert à programmer la carte D1 mini, entre autres).
- Installer les cartes dans arduino IDE et paramétrez la carte dans le menu outils d'IDE (cf readme et image sur github).
- Installer les librairies correspondantes au programme dans le dossier d’Arduino IDE (dispo en zip sur github).
- Ouvrez le .ino et modifier si nécessaire dans le programme les broches utilisées par Mavlink (tx et rx), insérer l’identifiant de votre drone (sinon ce sera "ILLEGAL_DRONE_USE_YOUR_SHOTGUN").
Compilez le programme sous IDE pour vérification puis téléversez. Attention certaines broches empêchent le téléversement, par exemple la GPIO 02 que j’utilise doit être débranchée durant la programmation.
Attention le marquage des broches sur la carte est différent des broches GPIO "réelles".
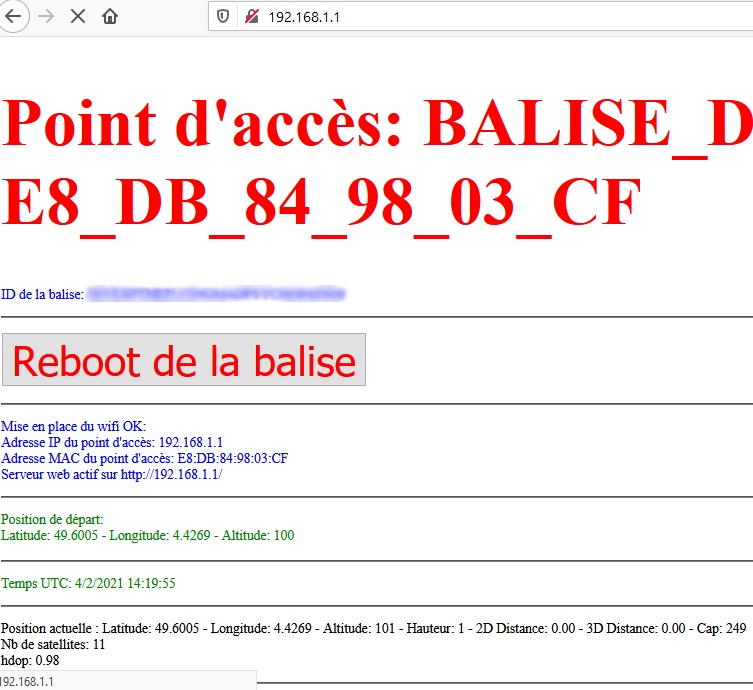
Vérifiez le fonctionnement, avec le moniteur série d'IDE et en connectant votre pc en wifi sur le réseau crée (code 1234567890) en tapant 192.168.1.1 dans votre navigateur web.
Volez!
J'ai hésité avec la partie tutorial, si d'aventure j'avais eu tort Dehas sera me déporter au bon endroit, bref...
Comme vous le savez, ou devriez le savoir, nombre d’entre nous sont concernés par la nouvelle lois qui implique d’avoir une balise wifi qui émet (entre autres) la position du drone toutes les 3 secondes ou tout les 30m.
La fédé d’aéromodélisme avait promis 10€ 10g, des balise sont sorties à 150€, à 60€…etc.
Je vous propose 3€ 10g soit mieux que la fédé, si vous possédez déjà la connectique.
Mon travail est lui-même basé et largement inspiré sur une autre version de cette même balise qui comporte un gps BN220 et une carte D1 mini.
Page d’explication ici : tranquille-informatique.fr/balise-dgac-signalement-electronique-a-distance-drone-aeromodelisme.html
Pour les bidouilleurs le fil complet ici (je vous préviens c’est long): https://discuss.ardupilot.org/t/open-source-french-drone-identification/56904/
La différence avec mon système? Je vole en pixhawk et ce gps supplémentaire vient en redondance avec celui branché sur le pixhawk. J’ai donc entrepris de récupérer toutes les informations via Mavlink pour me passé de ce BN220 ce qui au passage économise 10€ et quelques grammes dont tous peuvent donc bénéficier.
Tout est là : https://github.com/BL08FR/balise_dgac_web_Mavlink
Préalable :
- Avoir en sa possession une carte type wifi D1 mini (3€ chez les tchang) et un jeu de câbles pour se branché sur un port TELEM du FC.
- Installer Arduino IDE (programme qui sert à programmer la carte D1 mini, entre autres).
- Installer les cartes dans arduino IDE et paramétrez la carte dans le menu outils d'IDE (cf readme et image sur github).
- Installer les librairies correspondantes au programme dans le dossier d’Arduino IDE (dispo en zip sur github).
- Ouvrez le .ino et modifier si nécessaire dans le programme les broches utilisées par Mavlink (tx et rx), insérer l’identifiant de votre drone (sinon ce sera "ILLEGAL_DRONE_USE_YOUR_SHOTGUN").
Compilez le programme sous IDE pour vérification puis téléversez. Attention certaines broches empêchent le téléversement, par exemple la GPIO 02 que j’utilise doit être débranchée durant la programmation.
Attention le marquage des broches sur la carte est différent des broches GPIO "réelles".
Vérifiez le fonctionnement, avec le moniteur série d'IDE et en connectant votre pc en wifi sur le réseau crée (code 1234567890) en tapant 192.168.1.1 dans votre navigateur web.
Volez!






