Voilà, après le 250 cicada et le F450 je voulais une nouvelle machine pour faire des vols FPV en low riding.
Je voulais tester la CC3d revo avec un GPS pour un compromis entre le F450 équipé du Naza V2 et le 250 cicada que je découvre et redécouvre au grès des configurations. Je viens de le passer en betaflight et cela m'a donner d'autres idées.
Mais plus je vole et plus je pense qu'il me faut des machines spécifiques à chaque utilisation avec sa propre configuration et ses propres réglages.
Le 250 Cicada pour le FPV car je l'ai et il commence a bien volé, ou plutot moi qui commence a me dérouillé tout doucement les doigts.
Le F450 pour la prise de vue, surtout depuis que j'ai monté le Ground station DJi (Data Link module) et là ce n'est rien de le dire ça vole tout seul.
Et maintenant le Robocat pour les longs volsFPV dans les champs ...qui sera suivi d'un Sigan 180 pour la voltige mais pas encore reçu ...
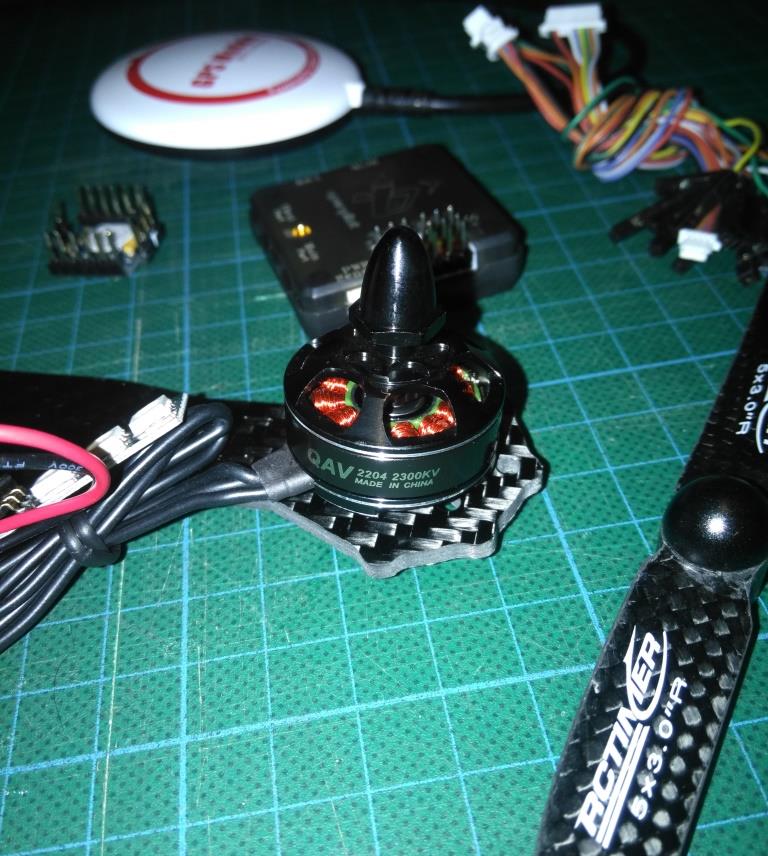
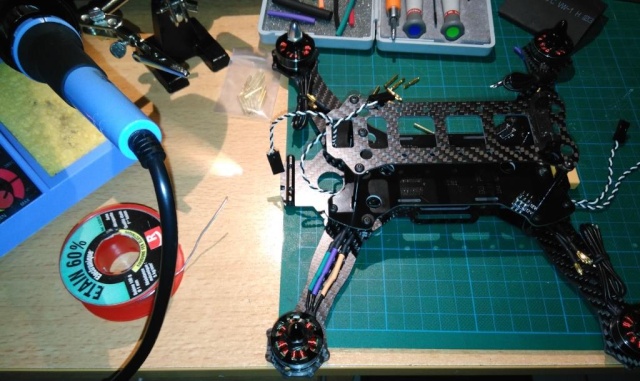
J'ai commence le montage du Robocat doucement en attendant les esc BH Héli et le récepteur.
En image :
et le petit dernier :
Donc de quoi occuper les longues soirées d'hiver !
A suivre ...
Re: Robocat 270
Posté : jeu. 7 janv. 2016 19:47
par azbloc
tu monte le module GPS pour avoir un vol stable comme sur un gros multi ?
Re: Robocat 270
Posté : ven. 8 janv. 2016 08:01
par lego75
Oui, c'est ce que je voulais tester. Une solution avec GPS et la CC3D révo.
Cela a aussi orienter mon choix sur ce modèle, car le châssis articulé et sur plusieurs niveaux permet un accès facile et un séparation des différents éléments : récepteur, contrôleur, gps et émetteur vidéo.
Je ne pourrais faire les premiers vols que dans une semaine car je reçois les derniers éléments en début de semaine prochaine.
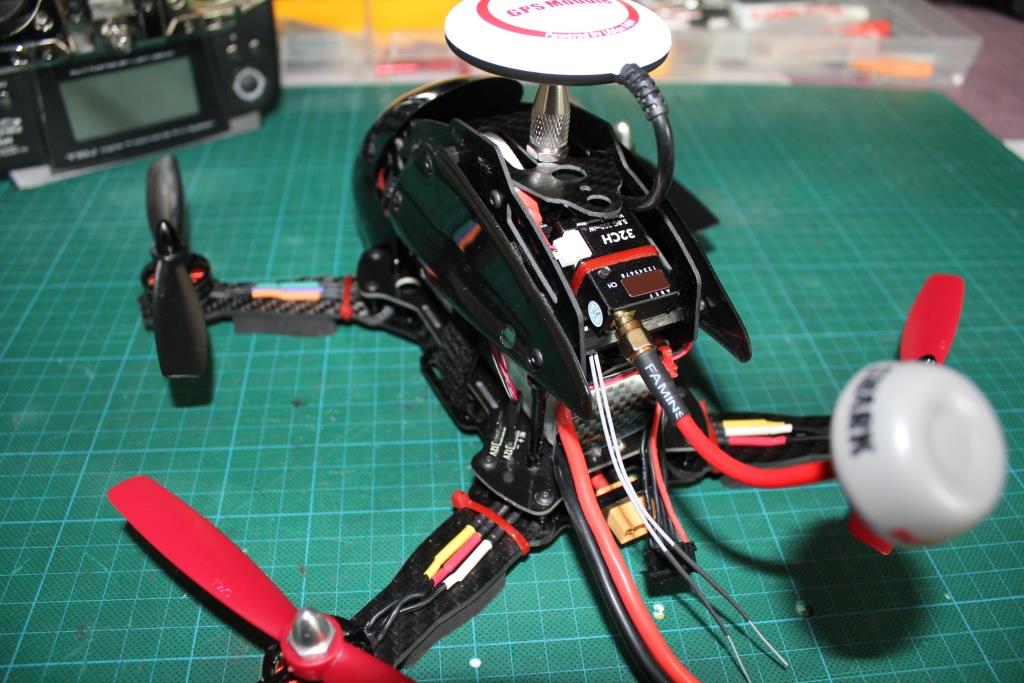
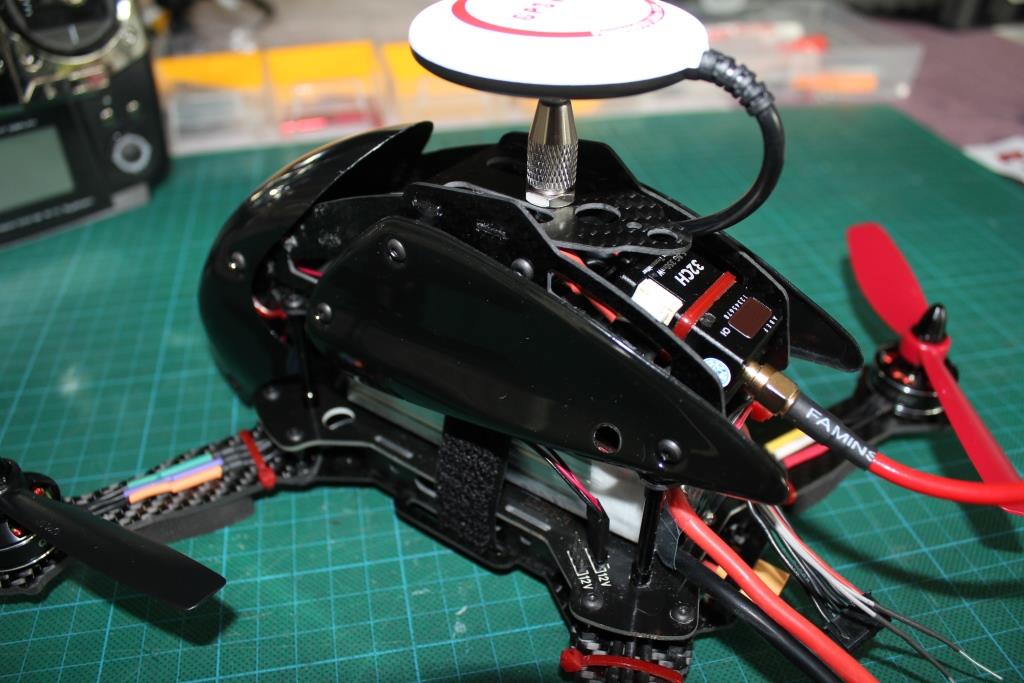
L'idée est de positionner le GPS directement sur la platine supérieur comme cela :
Autre point que je voulais découvrir,c 'est Librepilot GSC pour configurer la carte et qui me semble vraiment très bien, en tout cas très complet.
Le flashage de la carte ainsi que la première configuration m'a beaucoup plus avec des étapes pas à pas, y compris le calibrage des moteurs.
Reste à voir le comportement en vol, mais ce que j'en est déjà vue, me laisse à penser qu'il convient à mon besoin.
Sur le 250 Cicada j'ai commencé avec Baseflight qui a donné de très bons résultats, puis Cleanflight que je n'ai pas aimé. Le comportement du quad ne me plaisait pas du tout, malgré les nombreux réglages. Et je viens de le passé en Betaflight que je trouve vraiment très bien mais à mon avis pour de la voltige ou du FPV Racer
Un peu plus bientôt je l'espère...
Re: Robocat 270
Posté : ven. 8 janv. 2016 12:24
par jus77
Yop yop
Petite question est ce que ce module gps serai adapté pour une cc3d du kylin kds 250 ??
Re: Robocat 270
Posté : ven. 8 janv. 2016 13:09
par lego75
Là je ne saurais être affirmatif, il est compatible avec la mini cc3d.
Le Kylin a une platine intégrant tout il me semble et j'aurais tendance à penser que oui, mais sans aucune certitude.
très intéressant, un petit racer stabilisé qui peut évoluer en mode acro, tu n'est pas trop limite niveau poids ?
remarque, faut essayer pour en avoir le cœur net
4S power ou tu reste en 3S ?
Re: Robocat 270
Posté : lun. 11 janv. 2016 21:51
par lego75
Il est prévu en 4s et j'ai pris des batteries 4s de 1800 mah.
Ce qui fait qu'il sera assez lourd, je pense au alentours des 650 gr en ordre de vols, en sachant que la batterie fait 220 grs à elle toute seule. Mais pour le type de vol que je veux faire cela n'a aucune importance et surtout au vue de la réserve de puissance des moteurs.
J'espère avoir le temps de le finir cette semaine, pour le tester ce week-end ! je pourrais en montrer un peu plus...
Re: Robocat 270
Posté : lun. 11 janv. 2016 22:22
par gemko
Salut
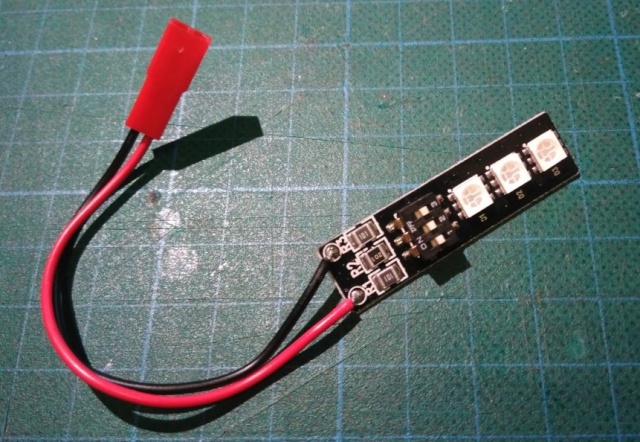
Sympa les leds, où peut on les trouver, tu as un lien ?
On change la couleur avec les inters, intéressant aussi de pouvoir les éteindre complètement. le câble et le connecteur sont montés d'origine
Re: Robocat 270
Posté : mar. 12 janv. 2016 10:06
par STC.
super led, je confirme. sur mon gros bourdon (450) j'en ai posé 6 (une par bras) et parametré vert a droite, rouge a gauche, comme pour les éclairages règlementaires + blanc devant et bleu AR ideal pour reperer le sens du quadri en vol a vue.
sinon, question bete: pour le montage de la CC3D, l'as-tu tournée de 90° pour avoir les pins moteur vers l'AV ?
je suis en train de monter un chassi identique .
Re: Robocat 270
Posté : mar. 12 janv. 2016 18:49
par lego75
Je pense placer la carte avec les prises sur le coté droit, ceci me permet de placer au dessus le récepteur radio.
L'essais semble concluant et tout passe ... bizarrement je pensais que j'aurais plus de place sur ce châssis et je m'aperçois que les emplacement ne sont pas aussi important que je le pensais.
Re: Robocat 270
Posté : mar. 12 janv. 2016 21:17
par STC.
oui, au final, il est assez etroit.
je pense (a confirmer) placer les ESC 12A en deportant le condo sinon, ca passe pas dans les logements dédiés des bras car elles passent pas sinon.
Pour ma part, j'ai laissé tombé le recepteur PWM pour passer en PPM. il est ridiculement petit (c'est ca de gagné) et donc de la place pour caler le VTx au dessous de la plaque superieure, juste au dessus de la CC3D.
Apres test tout a l'heure, c'est pas mal. mais il faut les pins moteurs vers l'avant (donc un "90 yaw" dans GCS) -> cablage plus propre, ca passe mieux, connexion RX dans l'axe et USB sur le coté plus pratique a connecter.
Re: Robocat 270
Posté : mer. 13 janv. 2016 19:20
par lego75
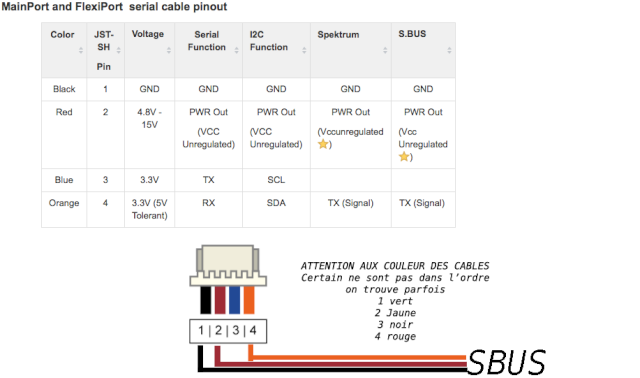
Pour le récepteur, j'aime bien le Sbus de la Futaba (je suis avec une T10J), par contre je pense supprimer la boite et les pins qui ne me serviront pas sur le récepteur pour le placer sur le boitiier de la CC3D ou effectivement en dessous de la plaque supérieur.
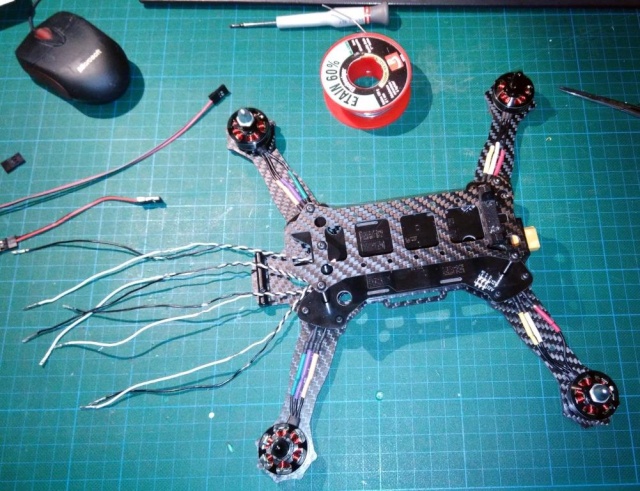
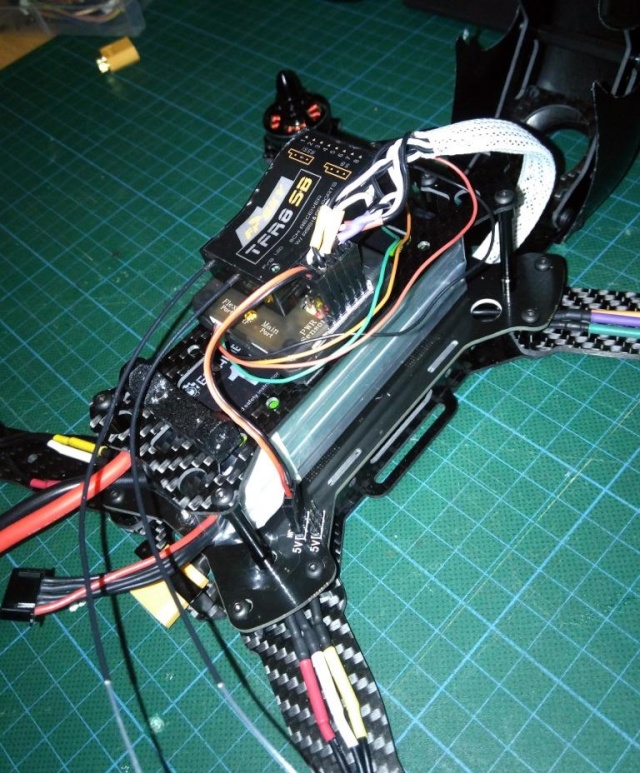
Pour les esc, les Rctimer de 20A tiennent sous la carte de distribution sans problème, je les ai donc placés là. Le poids n'étant pas une obsession pour ce modèle, en tout cas n'ayant aucune importance pour ce que je veux en faire, j'ai monté des fiches entre les moteurs et les ESC pour la maintenance et l'inversion des moteurs si nécessaire. Quoique comme ce sont des CW et CCW, je ne sais même pas s'ils peuvent tourner à l'envers ?
Pour le branchement de la CC3D revo en Sbus/Futaba, il suffit de raccorder comme sur le schéma suivant :
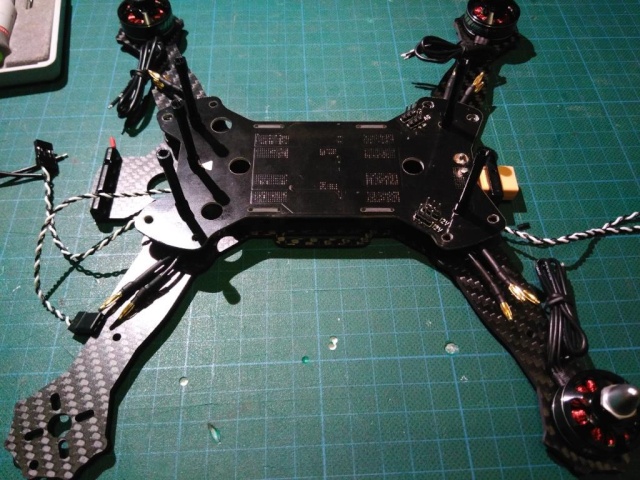
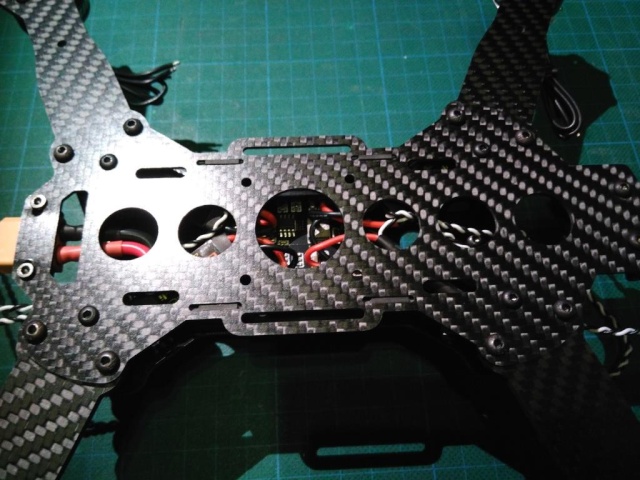
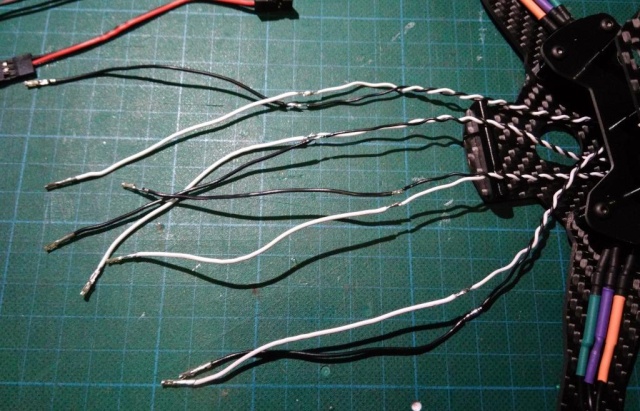
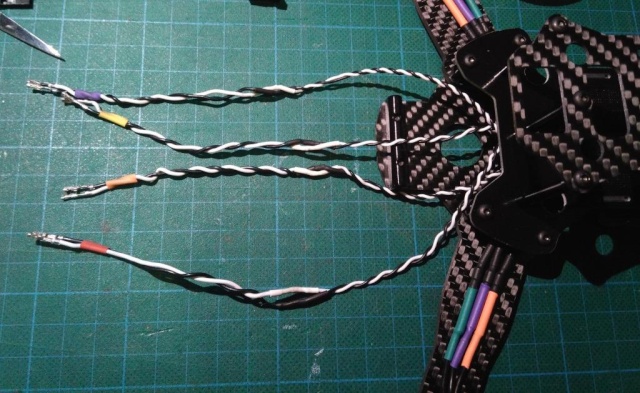
La suite du montage en image :
Re: Robocat 270
Posté : jeu. 14 janv. 2016 20:19
par lego75
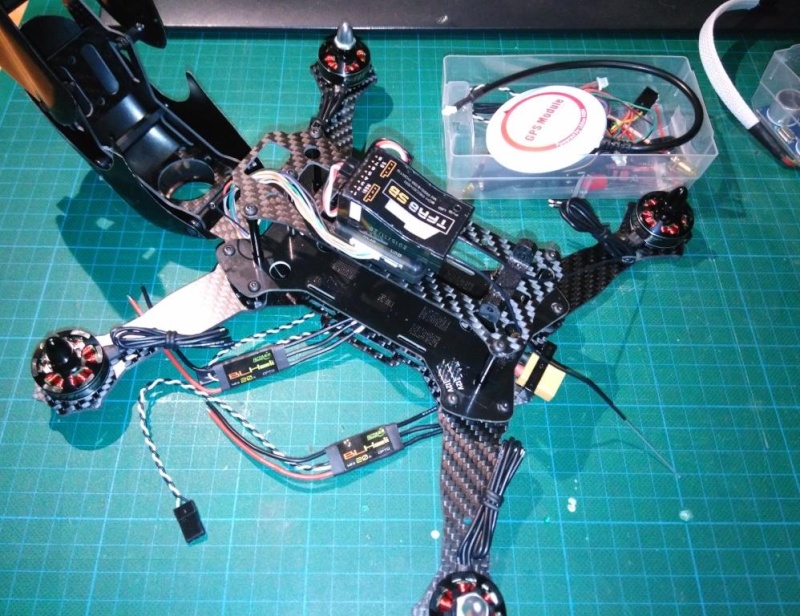
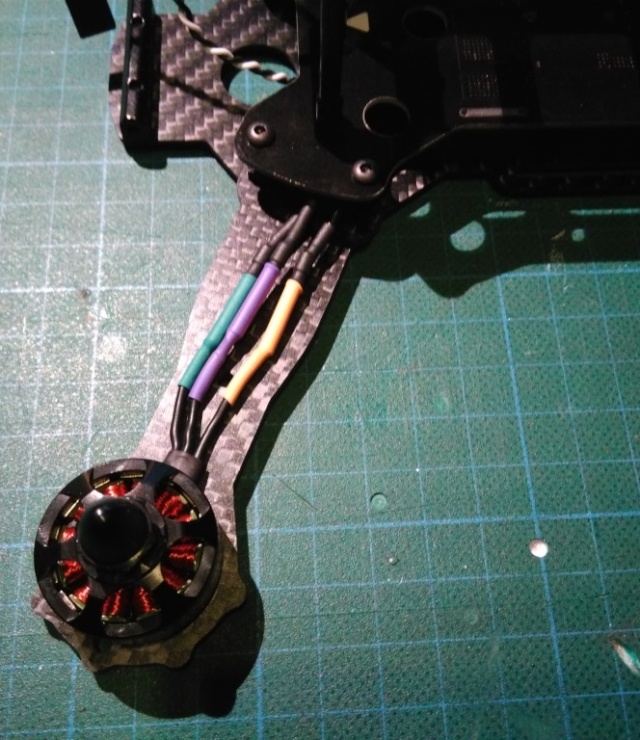
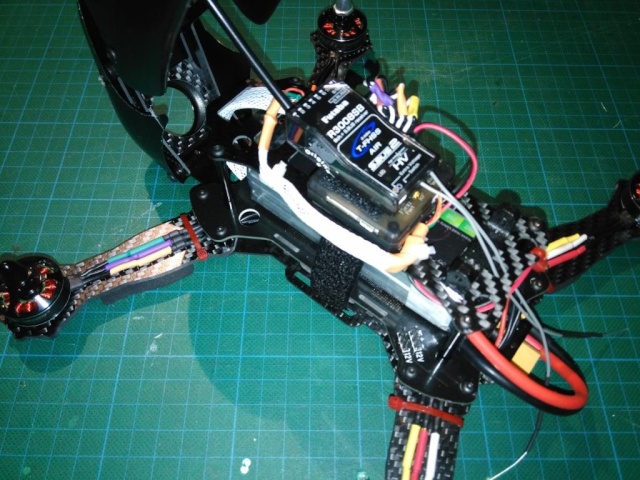
J'ai dû rallonger les fils des esc que j'ai ensuite identifiés par une bague de couleur et regroupé dans une gaine tressée.
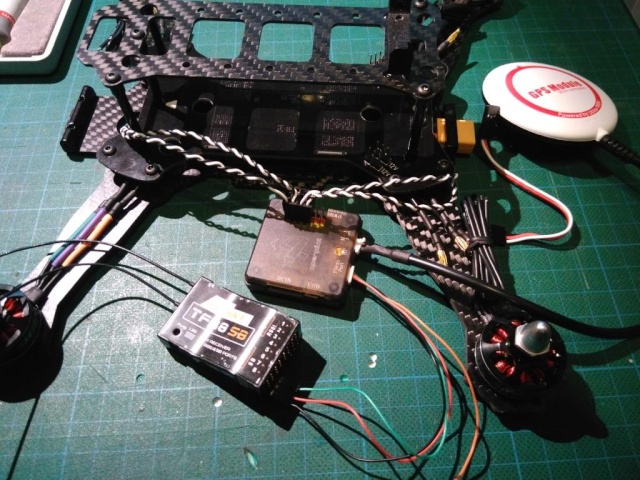
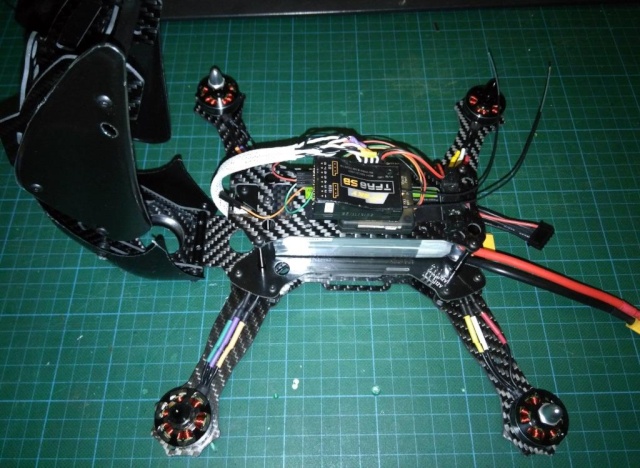
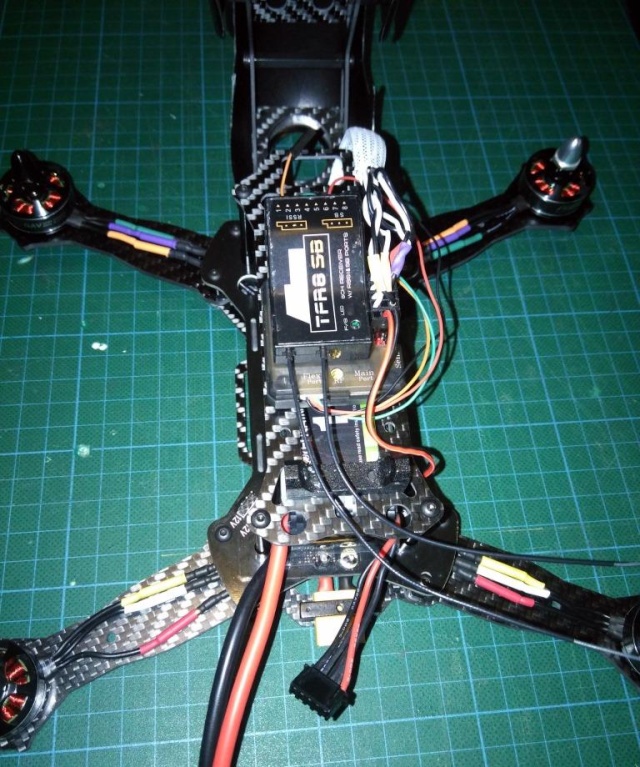
La carte est positionnée sur le dessus de la platine supérieur et le récepteur fixé directement dessus, le tout est fixé au double face et sera maintenu par des rilsans après les premiers essais.
Il me restera à organiser un peu mieux le passages des fils et mettre les éléments pour le FPV, mais après les premiers vols.
Demain je commencerais la programmation sous Librepilot GSC qui me plait vraiment beaucoup. J'ai déjà flashé la carte CC3D revo et l'interface ainsi que l'assistance m'a beaucoup plus.
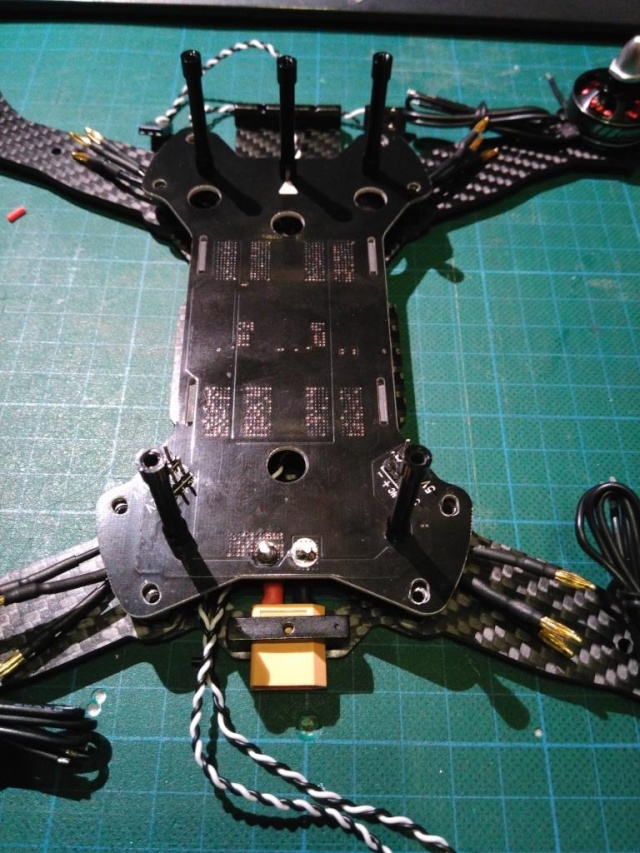
En image :
A suivre...
Re: Robocat 270
Posté : sam. 16 janv. 2016 17:19
par lego75
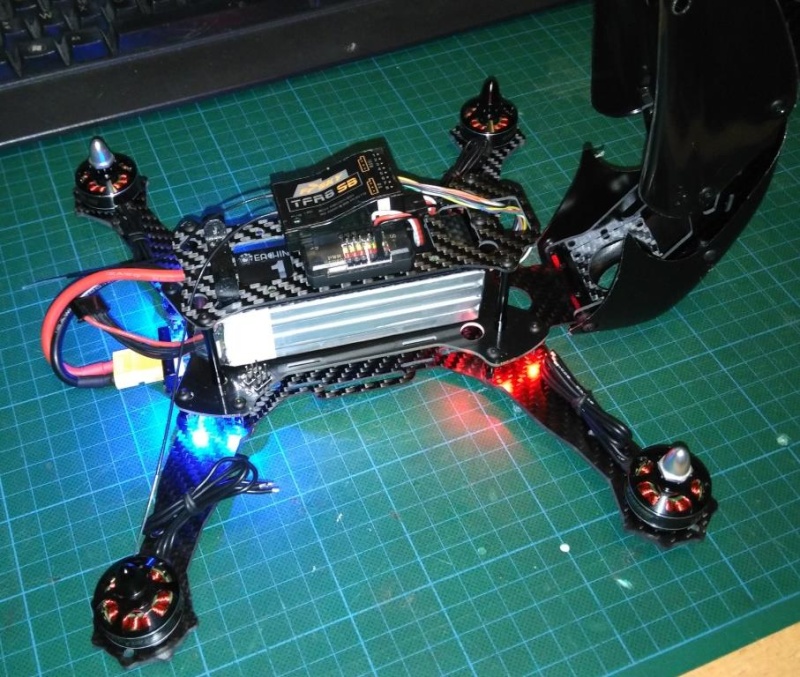
Bon,
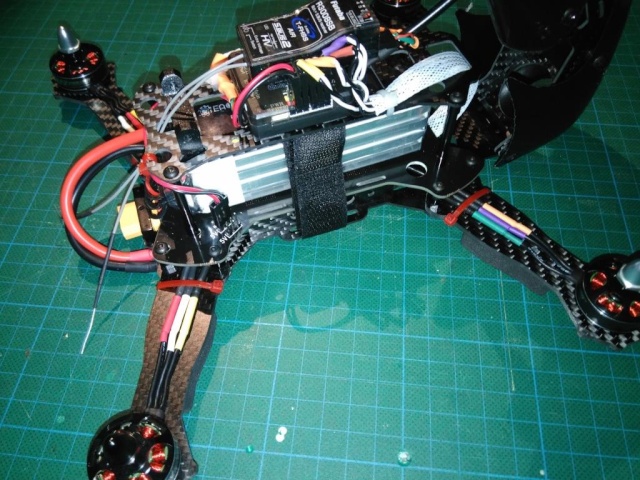
Le montage c'est terminée pour cette phase. La semaine prochaine je mettrais la caméra, le transmetteur et l'OSD. J'ai paramétré le drone sous Librepilot GSC en suivant un tuto sur Youtube et aucun problème ... dès que j'ai compris que j'avais branché la sortie Sbus sur le mauvais port serial
Le tuto et au passage bravo à Quentin D : " onclick="window.open(this.href);return false;
Un peu de galère avec le récepteur Frsky TRSB8Fr que je n'ai pas réussi à Binder avec l'émetteur? Je pense que ce modèle n'est pas compatible avec la T10J Futaba. Je me suis donc rabattu sur un récepteur R3008SB de la marque.
Pour commencer j'ai laisser les réglages d'origine pour le premier essais et avoir un point de comparaison. Mais comme ça sans rien toucher ça vole pas mal, même sans avoir calibrer les gyros et le reste...
Mon choix d'hélice est à revoir car les RCTimer en 5x3" carbon ne sont pas adaptées et de plus mal équilibrées donc quelques vibrations et oscillations qui devraient disparaître avec les bonnes hélices . Avec du 4S et les 2204-2300KV je pense passer sur des 6030 des 5045.
Hélas il fait un peu froid aujourd'hui pour poursuivre les essais, mais je ne suis pas déçu... vivement les vrais premiers vols !
Avec le 250 Cicada :
Re: Robocat 270
Posté : dim. 7 févr. 2016 18:20
par lego75
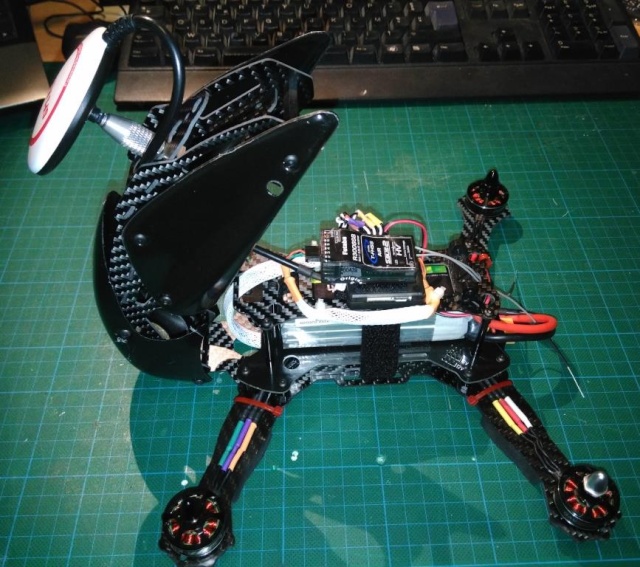
Avec un peu de retard, j'ai enfin reçu la camera et l'émetteur : une Eachine CCD 800 TVL et un BOS 350 en 350 mw.
Le montage est classique et vraiment facile sur le Robocat, facilité par la PCB qui possède les sorties 12 v et les multiples platines permettant de bien placer les différents éléments.
Une fois monté tout fonctionne parfaitement et je ne pense pas mettre d'OSD sur celui-ci, ce qui simplifie un peu le montage. J'ai aussi remplacé les hélices 5x3 qui n’étaient pas adaptées à la motorisation par des 6x4.5 bullnose et le comportement du Robocat c'est transformé... beaucoup de puissance... vraiment impressionnant la réactivité et la puissance obtenue. Mais elles passent tout juste et je vais aussi essayer des tripales en 5x4.5 bullnose pour voir ce qu cela donne
Il ne me reste plus qu'à vider des accus et essayer de faire une vidéo de ce petit engin que je trouve de plus en plus sympathique... en attendant je vais sortir la loupe et m'attaquer eu Sigan 180 et finir le montage du train rétractable sur le F450 DJI... il faut bien s'occuper l'esprit pendant les journées d'hiver
A bientôt !
Re: Robocat 270
Posté : lun. 8 févr. 2016 18:57
par azbloc
c'est super bien intégré!
Re: Robocat 270
Posté : sam. 13 févr. 2016 07:21
par Benda
Bonjour à tous,
Lego75, tu as fait comment pour centrer le robocat ? Son CG se trouve til à l'intersection des moteurs ?
Merci pour votre aide
Envoyé de mon iPhone en utilisant Tapatalk
Re: Robocat 270
Posté : sam. 13 févr. 2016 12:01
par lego75
Le centre de gravité est au centre des moteurs et c'est dû en grande partie aux répartitions du châssis.
La batterie lipo 4s de 1800 mah est au centre du châssis.
La carte et le récepteur radio au dessus de la lipo à peu près au centre et la caméra à l'opposé de l'émetteur vidéo. Les masses sont donc réparties. Les premiers vols ont montré un comportement très sain, même avec les réglage Librepilot d'origine.
Il faut par contre que je m'habitue à la différence de puissance en 4S car le Robocat est vraiment beaucoup plus vif que le 250 cicada en 3S, mais c'est ce que je recherchais.
@+
Re: Robocat 270
Posté : ven. 19 févr. 2016 19:11
par Nola
pour avoir un robocat aussi je te dirais bien d'essayer des 5 X 45 bn je pense que tu va gagner en vol ...
Re: Robocat 270
Posté : ven. 19 févr. 2016 22:37
par lego75
Merci Nola,
C'est ce que j'ai pensé après avoir monté les 6", j'ai donc commandé des 5045 bullnose que j'attends. mais le couple 2204-2300 avec des 6045 est impressionnant de puissance en 4s.
J'image donc que la conso va de paire et donc une autonomie plus faible. Au beaux jours je pourrais faire la comparaison.
@+
Re: Robocat 270
Posté : sam. 12 mars 2016 08:57
par Nola
Ou sinon tu peut aussi reduire tes 6045 en 5545
Re: Robocat 270
Posté : sam. 12 mars 2016 11:46
par lego75
Effectivement c'est une possibilité, même si je n'aime pas retaillé les hélices.
Autrement les tripales en 5045 sont vraiment très bien, bon réactivité, stable elles me conviennent parfaitement.
Re: Robocat 270
Posté : sam. 11 mars 2017 19:03
par batsboss
Salut lego75,
Quel est ton temps de vol avec ta batterie 4s de 1800 mah.?
est il possible de mettre une 4s plus grosse sur le robocat 270 pour augmenter l'autonomie ?
Merci de ta réponse
Re: Robocat 270
Posté : lun. 13 mars 2017 07:56
par lego75
Bonjour,
J'ai vendu le Robocat et je n'ai plus l'autonomie en mémoire. Pour ce qui est de la batterie tu es limité par l'emplacement et je pense qu'il sera difficile de mettre une batterie plus grosse.